首页->机器人
传统的机器人运动控制器大部分是以嵌入式单片机为核心的,但其运算速度和处理能力远不能满足机器人控制系统飞速发展的需要,日益成为阻碍机器人技术进步的瓶颈。随着以电子计算机和数字电子技术为代表的现代高技术的不断发展,尤其......
引言 对于机器人控制技术,实时性和稳定性是研究的重点。现阶段,机器人控制的主要方法是在离线状态下对步态进行规划,并在主控机上对机器人的运动进行实时的补偿,这种处理方法对处理器的运算速度和处......
1 项目概述 1.1 引言 从机器人诞生到上世纪80年代初,机器人技术经历了一个长期缓慢的发展过程。到了 90年代,随着计算机技术、微电子技术、网络技术等的快速发展,以及人类活动领域的不断扩......
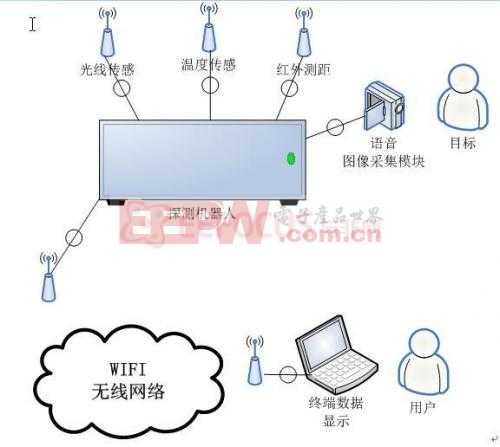
一、项目概述 1.1 引言 近期日本地震及其引发核辐射的影响,人们对地震和核辐射的危机意识进一步增强,为此本组设计并制作一个寻迹智能机器人,根据一定要求完成从出发区到辐射探测区的避障、探测、......
1 引言 机器人听觉系统主要是对人的声音进行语音识别并做出判断,然后输出相应的动作指令控制头部和手臂的动作,传统的机器人听觉系统一般是以PC机为平台对机器人进行控制,其特点是用一台计算机作为......
如今机器人大家已经不陌生了,各种玩具机器人,以及像做手术、采摘水果、剪枝、巷道掘进、侦查、排雷、潜海机器人等出现在大家......
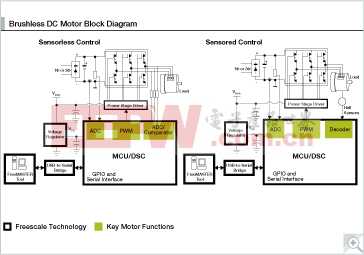
无刷直流(BLDC)电机在风扇、泵、HVAC风机与压缩机、计算机磁盘驱动器与外设、家用电器、机器人、伺服系统、牵引控制、缝纫机和跑步机等应用中广泛使用。BLDC电机是一种旋转电动机械,其定子为类似感应电机的传统三相......
......
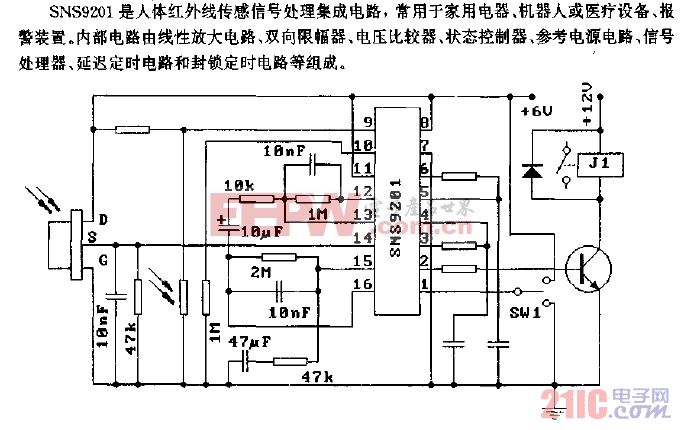
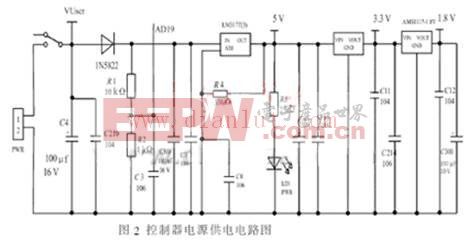
机器人控制器电源供电电路 ......
 angelazhang 2015-07-02
angelazhang 2015-07-02
 angelazhang 2015-06-12
angelazhang 2015-06-12
 angelazhang 2015-03-28
angelazhang 2015-03-28
 angelazhang 2015-01-12
angelazhang 2015-01-12