首页->小车
光导智能小车基本原理 当左边光电池输出电压大于右边光电池输出电压,表明光源处于小车左侧,小车左转。当右边光电池输出电压大于左边光电池输出电压,表明光源处于小车右侧,小车右转。当右边光电池输出电压等于左边光电池输出电压,表......
电动智能小车的制作 一、方案论证 1.路面情况检测方案的选择 探测路面黑线的基本原理:光线照射到路面并反射,由于黑线和白纸对光的反射系数不同,可根据接收到的反射光强弱来判断黑线,可实现的方案有以下几种: 方案一:采用普通......
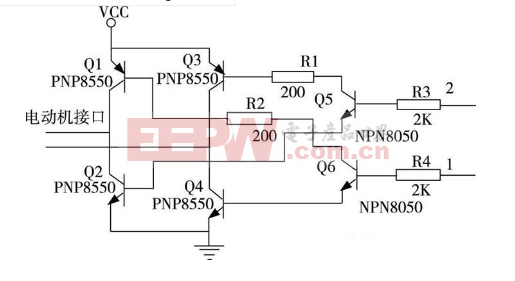
智能小车驱动电路是一个全桥驱动电路, Q1,Q2, Q3, Q4四个三极管组成4个桥臂, Q5 控制Q2和Q3的导通和关断, Q6控制Q1 和Q4 的导通和关断, 驱动电路分别用于后轮动力驱动电路和前轮方向驱动电路。当1......
......
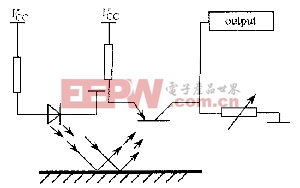
本文将介绍一种应用于寻迹小车的分布式控制系统的设计方法,该系统可对电机模块、传感器模块和灯控模块进行分布式控制。这样设计是为该系统将来从寻迹小车到真车进行移植提供方便。 此寻迹小车模型采用7.5V电池驱动,通过......
 fanxiaoxi 2022-12-12
fanxiaoxi 2022-12-12
 dolphin 2012-10-31
dolphin 2012-10-31
 卤煮火烧 2009-09-03
卤煮火烧 2009-09-03