汽车电子液压制动系统跟随特性的实验研究 ----汽车 EHB 系统的工作原理及总体方案的设计


第2章汽车EHB系统的工作原理及总体方案的设计
2.1引言
EHB系统是一种先进的线控制动系统,具有防止ABS工作时制动踏板“抖动”、制动响应快、制动压力上升梯度大、可集成ABS、TCS、ESP功能等优点,适用于混合动力汽车及电动汽车。为了给后续实际搭建实验台做好准备,本章对EHB系统的工作原理和总体方案进行研究,主要包括EHB系统执行机构及电子控制单元的组成结构和方案设计,并对各个元件的具体安装位置进行布置。
2.2 EHB系统方案
2.2.1试验台预期试验目标
基于EHB试验台试验,更好的实现如下传统制动功能;
(1)ABS(制动防抱死系统)功能;
(2)EBD(电子制动力分配)功能;
(3)ESP(电子稳定性控制)功能;
(4)TCS(牵引力控制系统)功能;
(5)主动防侧翻功能。
基于此试验平台,可以进一步研究相应的控制策略及状态估计算法(如车速及路面估计)。在条件许可情况下,还可以加入踏板力模拟及应急制动模块,进而研究踏板力反馈、EHB容错控制等。
2.2.2试验台试验工况
(1)行车制动(轻微制动工况)
行车过程中,驾驶员采取轻微制动使得车速有所缓慢下降,在此工况下可以检验制动压力的稳定性及实际轮缸制动压力对其理想值的跟随效果。
(2)紧急制动
a均一附着路面
低附着路面(附着系数0.1~0.3之间)以v=40k m /h车速直行,高附着路面(附着系数在0.7~0.9之间)以vmax=0.8v≤120km /h车速直行,车速稳定后,急促全力制动。
b对开路面
车辆的纵向中心平面通过对开路面交界线,在v=50km/h的初速度下急促全力制动。制动时可利用转向来修正行驶方向,汽车的任何部分不应越过交界线。
c对接路面
在高附着系数(附着系数在0.7~0.9之间)路面上,急促全力制动。保证车辆以速度v=40km /h和速度vmax=0.8v≤120km /h从高附着系数路面驶入低附着系数路面。在低附着系数(附着系数0.1~0.3之间)路面上,急促全力制动。保证车辆以v=40km /h从低附着系数路面驶入高附着系数路面。
2.2.3 EHB系统总体方案
EHB系统以电子元件加以替代原始制动系统中的部分机械元件,制动系统中原有的液压系统不作大的改变。这样可以由液压系统提供动力,电子系统提供柔性控制,是机电液一体化的高新技术产品,有很大的发展潜力。EHB系统的总体方案如图2.3所示
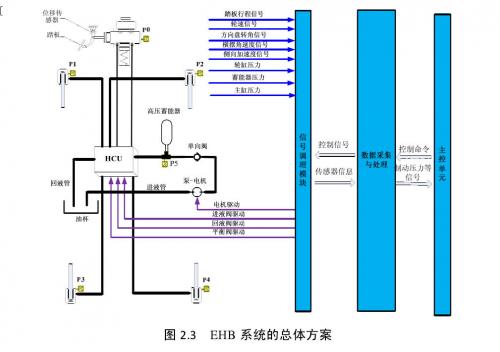
EHB系统的主要包括两个部分:液压执行机构主要包括:高压蓄能器,液压泵,制动液储油杯,进、出液电磁阀等,电子控制单元主要包括:传感器信号输入单元,主控单元,执行器驱动单元,及一系列传感器:包括档位传感器,方向盘转角传感器,横摆角速度传感器,制动踏板行程传感器,油门踏板行程传感器,离合器行程传感器,轮速传感器和压力传感器,纵向及侧向加速度传感器等。
在制动踏板生产位移的过程中,数据采集系统将采集到的踏板行程传感器、各制动器压力传感器等反馈信号输入到电子控制单元进行分析和判断,对进出液电磁阀分别进行调节,当系统需要增压时,进液阀打开出液阀关闭,当系统需要保压时进出液阀均关闭,当系统需要减压时,进液阀关闭出液阀打开。通过输入PWM控制信号给高速开关阀从而控制各车轮上的制动压力。通过CAN总线技术ECU还可以接收来自于ABS,ASR,ESP的汽车动态数据,经过分析和处理,将控制信号发送到相应的控制单元,对汽车进行优化控制。
2.3 EHB系统执行机构
2.3.1 EHB系统执行机构结构
EHB系统的执行机构如图2.4所示,包括液压控制单元、制动踏板单元和制动器。液压控制单元:主要包括电机、液压泵、蓄能器、单向阀、溢流阀及四套结构相同的增压电磁阀、减压电磁阀分别控制各自的制动器;蓄能器一端连同溢流阀的输入端与四路二位二通的常闭增压电磁阀输入端相连。电动液压泵输入端和溢流阀的输出端汇成一路与储油杯的出油口相连。在蓄能器与电机之间装有防止制动液回流单向阀。四路二位二通的常闭增压电磁阀的输出端连同四路二位二通的常闭减压电磁阀的输入端汇成一路分别与制动器相连接,每个制动器与各自的增压电磁阀、减压电磁阀回路之间都装有压力传感器。四个减压电磁阀的输出端汇成一路连接到储油杯的回油端。前轮两个制动器和后轮两个制动器之间分别装有一个平衡控制阀。制动主缸上的一个出油孔与前轮制动器的应急制动管路及连接有踏板行程模拟器的液压管路相连,制动主缸上的另一个出油孔与后轮制动器的应急制动管路相连。模拟器控制管路装有监测主缸压力变化的压力传感器。电机泵与高压蓄能器共同组成EHB系统的压力源。电动液压泵为蓄能器提供高压制动液,持续为其蓄能,蓄能器为液压执行机构提供所需的制动压力,使系统能够实现多次连续制动。
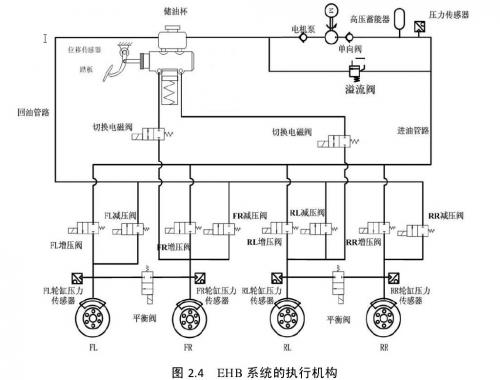
制动踏板单元:包括制动踏板、主缸、踏板行程模拟器、转角传感器,电磁阀和储油杯;储油杯与制动主缸的两个进油孔相连,安装有踏板行程传感器的制动踏板直接与制动主缸的推杆相连。
2.3.2 EHB系统的工作原理
EHB系统的工作过程主要是对压力供给单元的控制和高速开关阀的控制,首先是对压力供给单元的控制:压力供给单元包括电动液压泵和高压蓄能器,制动系统开始工作时,电动液压泵开始为高压蓄能器提供高压制动液,监测高压蓄能器的压力的压力传感器实时将测到的信号反馈给电子控制单元,当测得的值高于系统所标定的阀值时,高压蓄能器出液端连接的溢流阀打开,直至等于系统阀值溢流阀关闭。从而高速开关阀的一端得到的是持续且基本稳定的高压制动液。然后对高速开关阀进行控制:高速开关阀是通过PWM方式,通过调制控制信号的占空比,使阀口开度改变,控制输出流量。
驾驶员踩下制动踏板,数据采集系统将踏板行程传感器、及力传感器的信息汇同车辆的行驶状态(方向盘转角、轮速、车速、横摆角速度等)信息采集到ECU(电子控制单元)中进行综合分析和判断,当得知系统需要增压时,电子控制单元输出PWM控制信号,对电磁阀进行控制,使进液阀输入流量增大,出液阀输出流量减小,直到达到所需制动压力。当得知系统需要保压控制时,电子控制单元通过对电磁阀进行控制,使增压电磁阀和减压电磁阀输出的流量保持不变。当得知系统需要减压时,电子控制单元对使进液阀输入流量减小,出液阀输出流量增大最终减小到所需的制动压力,当某几个高速开关阀控制回路失效时,电子控制单元将切换成应急控制模式,制动踏板力的液压管路与应急制动管路连通,踏板力直接通过液压管理加载在制动器上。
EHB系统取消了真空助力器及一些机械装置,并用电子器件代替。作为系统动力源的高压蓄能器可以持续稳定输出16Mpa的制动压力,可使系统对驾驶者的制动命令快速响应。另外,在EHB系统中,设置有制动备用系统,保留了车轮制动器和制动主缸,主制动系统与辅助制动系统互不干涉,当EHB系统失效时,备用系统开始作用,驾驶者的踏板力会按照传统的液压制动方式经制动主缸传递到前轮制动器上,大大提高了行驶安全性。
2.4 EHB系统控制器(ECU)方案
根据EHB线控制动系统的基本原理,EHB控制系统的组成结构如图2.5所示,主要由3部分功能组件组成:
(a)输入通道:输入通道包括踏板行程传感器、轮速传感器、压力传感器、方向盘转角传感器、横摆角速度传感器、侧向加速度传感器及其信号处理模块等,通过xPC系统将传感器信号采集到电控单元ECU,ECU经分析判断输出控制信号。
(b)输出通道:输出通道部分包括踏板模拟器上的电磁阀驱动模块,制动钳液压通路上的电磁阀驱动模块,故障容错通路上的电磁阀驱动模块以及液压泵电机驱动模块等。
(c)电子控制器单元(ECU)。ECU是EHB控制系统的核心部分,其主要功能是完成对外来传感器信号的采集、处理,对各种数据进行逻辑分析,识别驾驶员制动意图,计算出车轮的参考速度、参考滑移率和车轮的加减速度,并通过相应的控制算法得出结论,做出正确的判断,最后发出控制信号给执行机构,实现EHB系统的制动功能。
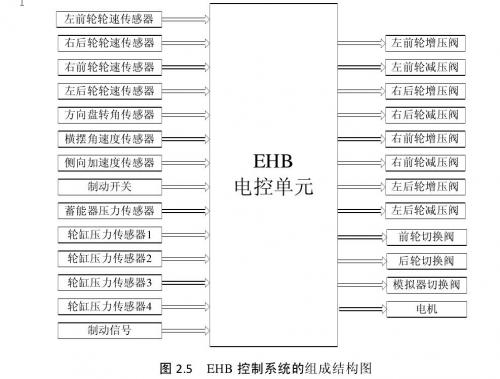
(d)执行机构:接收ECU发过来的控制信号,执行相应的动作。这里包括各个通路上的电磁阀和液压泵电机,以满足不同工况制动的要求。
2.5 EHB试验台架布置方案
为了更清晰明了的掌握EHB实验台的设计和布置,本文利用Solidworks软件所绘制的示意图,总体布局如图所示。EHB系统有电子控制单元、工控机、计算机、油箱、电机泵、单向阀、高压蓄能器、前后轮制动轮缸、电子制动踏板、HCU阀体、制动器、压力表压力传感器及管路等组成。
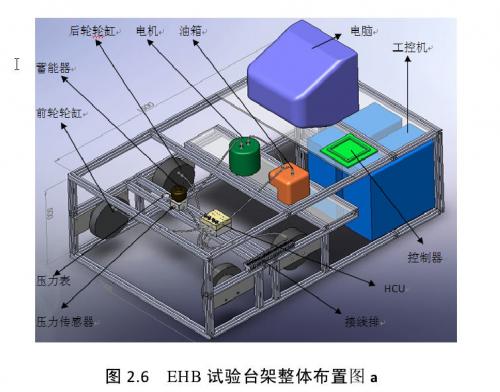
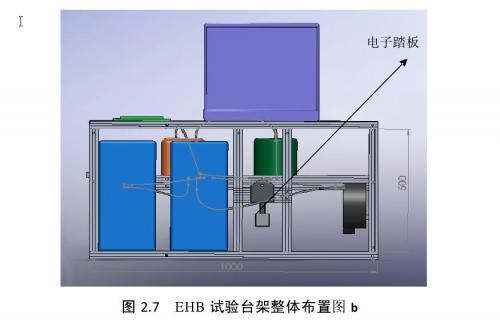
本文选用工业铝型材作为EHB系统的支撑框架,铝型材拆装容易,便于EHB系统组件的安装布置,试验台具体布置如图2.6、2.7所示:两个盘式制动器置于前端,两个鼓式制动器置于后端,电动液压泵的一端与单向阀相连,另一端与油箱的出液端相连,单向阀位于蓄能器与液压泵之间,蓄能器另一端与四个制动器的增压管路相连,一个二位二通的常闭增压电磁阀安装在增压管路上,轮缸压力传感器集成在HCU上,二位二通的常闭减压电磁阀位于EHB系统的减压管路上,四路减压管路汇成一路后与储油杯相连。
评论