首页->追光
......
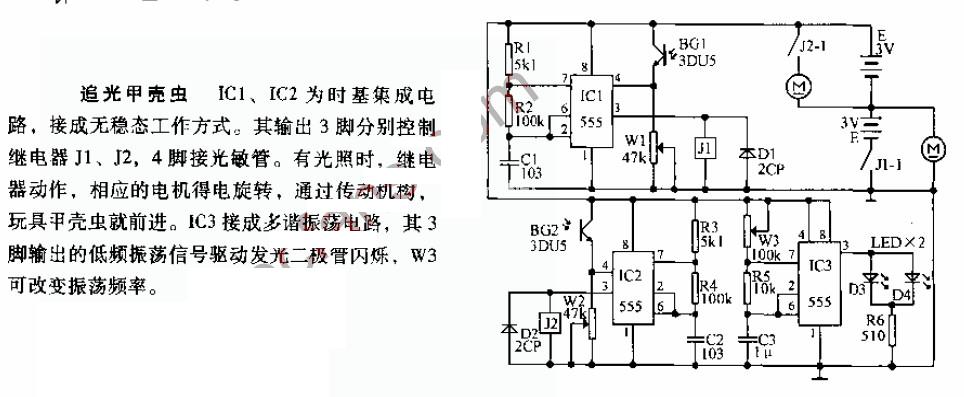
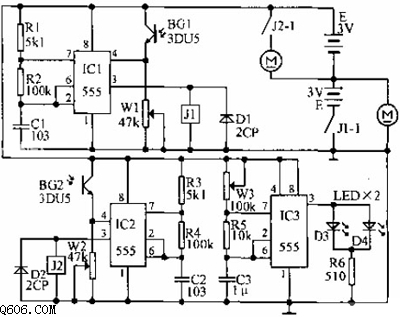
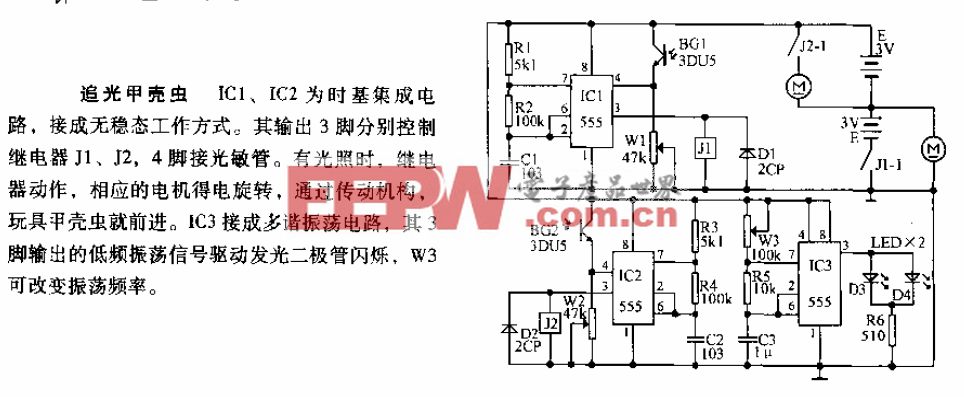
追光甲壳虫电路原理图 IC1,IC2,IC3为555时基集成电路,接成无稳态工作方式。 ......
IC1、IC2为时基集成电路,接成无稳态工作方式。其输出3脚分别控制继电器J1、J2,4脚接光敏管。有光照时,继电器动作,相应的电机得电旋转,通过传动机构,玩具甲壳虫就前进。IC3接成多谐振荡电路,其3脚输出的低频振荡......