由热释电传感器等构成的生物移动方向判别电路


本图是由热释电传感器等构成的生物移动方向判别电路。电路中的热释电传感器采用IRA-F0OlSX(传感器1和传感器2)。Al、A2(A3、A4)是2级放大电路,VTI、NE555(1)(VT2、NE555(2))是波形处理电路,由它们构成信号处理电路。Gl一G6为方向判别电路。NE555(1)和NE555(2)的工作时间要求一致,因此,要用电位器RP1对其进行调节。
该电路的工作原理简述如下:若被检测物体从传感器1向传感器2方向移动,则A与B输出脉冲如图3-24(b)所示。A输出脉冲约为0·75s,经过由RlCl决定的延时,输出C脉冲。由于输出B为高电平,因此,E输出脉冲,由此可判别物体的移动方向。若要有一定的检测距离,如2一5m,则使用由球面透镜构成的聚光系统与热释电传感器组合即可。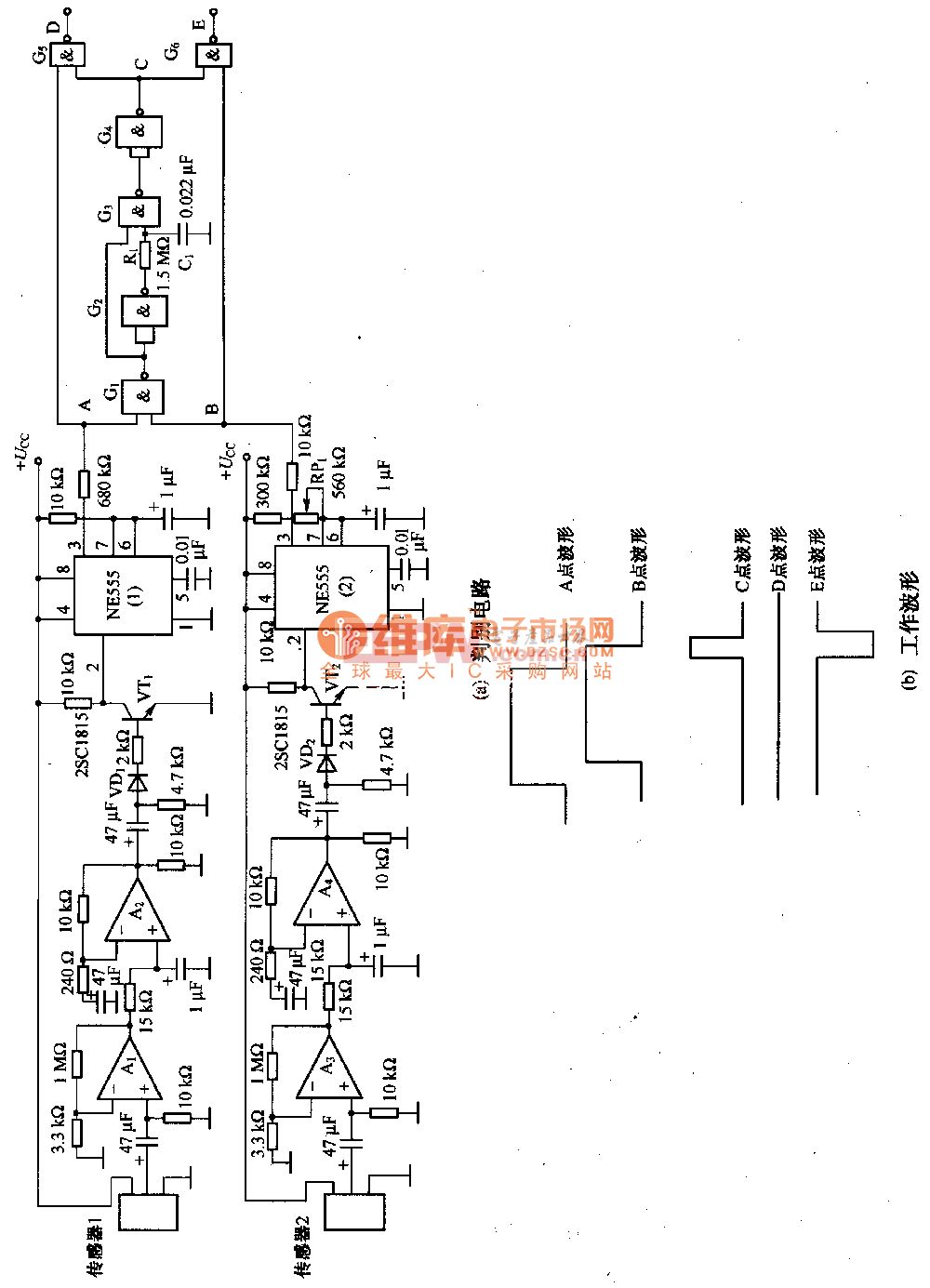
评论