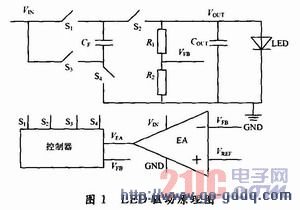
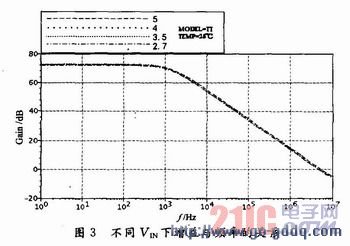
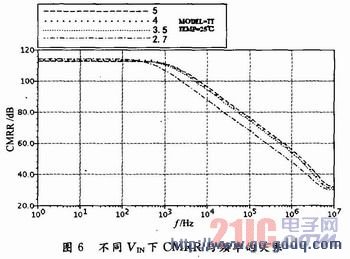
电荷泵型LED驱动器的CMOS误差放大器设计 发布人:dolphin 时间:2011-05-11 加入技术交流群 扫码加入和技术大咖面对面交流海量资料库查询 收藏 引言 白光LED的应用越来越广泛。一般白光LED正向导通压降约为3.4 V,典型值为3.5~3.8 V,而通常便携式设备主要供电电源的锂离子电池输出电压在2.7~5 V之间。如果用电源直接驱动白光LED,会产生白光LED发光亮度的不稳定,而且当电源电压降低到不能使LED正常发光,而电池放电还没有结束,就会影响到便携式设备的有效工作时间。所以,在便携式设备中,需要LED驱动电路,使电池在整个放电过程中都能保证LED正常发光。 针对电荷泵型LED驱动器的具体要求,设计了一款改进型误差放大器,该误差放大器在2.7~5 V的电压范围内工作,同时具有高的电源噪声抑制比和共模抑制比。 1 误差放大器的设计 1.1 电荷泵型LED驱动器 图1是电荷泵型LED驱动器的示意图,图中VIN是电源输入电压,VOUT为驱动器的输出电压,S1,S2,S3,S4是功率开关,CF为泵电容,COUT是LED驱动器输出电容,EA是误差放大器,VEA为误差放大器的输出电压,VFB表示电荷泵输出电压的分压信号,VREF表示精密温度补偿基准电压。电荷泵在1倍升压时,闭合S1,S2,打开S3,S4。电荷泵工作在2倍升压时,在充电阶段,闭合S1,S4,打开S2,S3;在放电阶段,打开S1,S4,闭合S2,S3,在时钟控制下不断周期性地充放电,同时在反馈控制电路的作用下,输出电压会稳定在一个预设值上,误差放大器仅在2倍升压时工作。 误差放大器的作用就是对精密温度补偿基准电压VREF和输出分压VFB进行比较,误差放大器输出电压正比于VFB和VREF的差值,VEA输入到控制器。整个控制原理是:如果VFB频率输出,电荷泵工作在升压状态,输出电压VOUT增大;如果VFBVREF,误差放大器的输出电压VEA减小,控制电路没有时钟频率输出,S1,S2,S3,S4都处于打开状态,电荷泵处在空闲状态。当电路处在空闲状态时,误差放大器继续对输出电压采样,如果输出电压在负载作用下降低,输出电压能够及时得到调整,对负载变化响应迅速,纹波较小。 据上述工作原理可以得到对误差放大器的要求: 第一,在电池供电范围内,误差放大器要满足宽电压工作要求。电源输出电压范围在2.7~5 V之间,在整个电池电压变化范围内,误差放大器的增益,相位变化要小。 第二,在便携式设备中,锂离子电池要同时给数字模块供电,电池的输出电压噪声较大,所以误差放大器要有较高的PSRR,同时要满足CMRR要求。根据所需指标,寻求合适的误差放大器来满足要求。 1.2 误差放大器的设计 图2是误差放大器的整体电路图。误差放大器的设计和实现过程中考虑到宽电压工作,高CMRR和PSRR的应用需要,采用单电源两级电压放大器的拓扑结构,它包含一级放大器A1,二级放大器A2和两个频率补偿电容,其中A1为对称全差分OTA,它将输出电压VOUT分压电压VFB和高精度温度补偿带隙基准电压VREF差值放大,使用全差分OTA是为了得到更好的频率特性。 第一级偏置模块由M13,M14,M15组成,IBIAS是一个高精度温度补偿基准电流源,M11,M12,M15组成电流镜结构给全差分运放放大器提供电流。M1,M2是差分输入对管,以M4,M5管为负载管,放大倍数很小。电阻R1为源级负反馈电阻,用来增加运放的压摆率,并提高运放的线性度。M20~M25为输出共模反馈管,用来调节运放第一级的共模输出电平。M4,M6,M7,M8,M9,M10组成共源级放大,采用这种结构是综合考虑带宽,相位裕量和宽电压工作的需要,V2为共源光栅器件提供合适的偏置,电路对V2点的电压要求不是很高,这是因为由M20~M25组成的输出共模反馈管,能够抑制V2点的噪声干扰。 第二级放大电路A2是把差分的双端输出转换成单端输出,这一级决定放大电路的放大倍数,同时VEA要有合适的电压摆幅,在整个工作电压范围内都能驱动负载。根据图2可以近似得出误差放大器的低频增益: W和L分别是晶体管的宽和长。 对如图2所示误差放大器,主极点位于第一级放大器A1的输出点。在A点放大器有最大的输出阻抗RA和最大的电容CA。由于第二级放大器A2的输出B点和A点的输出阻抗在同一个数量级上,两个点产生的极点相距较近,为了提高电路的稳定性,通常使用密勒补偿电容C1,C2,把这两个极点分开,得到较好的相位裕度。 由补偿前后对比可知,密勒补偿电容使两级间的主极点向原点移动,使输出极点向离开原点方向移动。在两级运算放大器电路中引入合适的补偿电容,使误差放大器的相位裕度大为增加,大大提高了系统的稳定性。 2 仿真分析 为了评估所设计电路的性能,对不同工作电压(2.7~5 V)下的误差放大器进行了仿真,仿真软件采用Cadence SpeCTRe,仿真模型基于CHRT 0.35 μmCMOS MIXED SIGNAL TECHNOLOGY工艺,仿真条件为25℃下全典型模型。首先,误差放大器的增益特性如图3所示,相位特性如图4所示。 由图3~图4可见,在2.7~5 V的工作电压下放大器的增益和相位变化很小,其增益约等于72 dB,相位裕度约等于52°。 图5是电源电压为2.7~5 V时,误差放大器的PSRR仿真结果。 从图5中可以看出,在2.7 V时PSRR约为93 dB,在5 V时PSRR约为106 dB。 图6是电源电压为2.7~5 V时,误差放大器的CMRR仿真结果。 从图6中可以看出,在2.7 V时CMRR约为114 dB,在5 V时CMRR约为113 dB。 3 结论 本文基于全差分对称结构,使用CHRT 0.35μm CMOS MIXED SIGNAL TECHNOLOGY工艺,设计了一款可作为LED驱动器内部使用的具有宽工作电压范围的CMOS误差放大器,新设计的误差放大器不仅降低了输出电压波纹及噪声,而且改善了稳定性,同时具有较高的PSRR,CMRR。





评论