正反馈回路和非最小相位系统根轨迹


正反馈回路和非最小相位系统根轨迹
4.7.1 正反馈回路根轨迹 ⒈引言:
⒊结论: 按零度根轨迹规则,绘制正反馈回路根轨迹,其步骤同负反馈。下面举例说明。
|
 |
| 图4-20 |
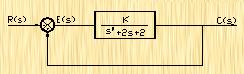
试绘制其内回路根轨迹。
图4-20
⑴.常规方法
①.两条根迹分支:分别起始于两个开环极点-1+j, -1-j,终止于s平面∞处。
②.实轴上根迹:因为实轴无开环零、极点,所以整条实轴是根迹。
③.两条渐近线之倾角: 
④.开环极点-1+j的出射角: 
⑤.会合点:由公式 
⑥.复平面上的根迹: 由幅角条件可知,两个开环极点之间的连线是根迹。
⑦.所求根迹,如图4-21所示。
⑵. “MATLAB”方法
解本题的MATLAB程序exe46.m:
n=[-1];
d=[1 2 2];
rlocus(n,d)
title(‘4-21’)
执行本程序,可得正反馈根轨迹图4-21
 |
| 图4-21 |
4.7.2 非最小相位系统之根迹
所谓非最小相位系统:
如果系统的所有极点和零点均位于s左半平面,则系统称为最小相位系统。如果系统至少有一个极点或零点位于s右半平面,则系统称为非最小相位系统。对于非最小相位系统之根迹绘制,要注意其幅角条件的变化。
例4-7 状态空间模型的概念说明
设一非最小相位系统如图4-22所示,试作出其根迹。
|
| 图4-22 |
⑴.常规方法
本系统的幅角条件为:



即 
据上面方程可以作出如图4-23所示
根轨迹。
⑵.“MATLAB”方法
解本题的MATLAB程序exe47.m:
n=[-1 1];
d=[1 2 0];
rlocus(n,d)
title(‘4-23’)
执行本程序,可得非最小相位系统根轨迹,如图4-23所示。
| 图4-23 |
⑶.附言:
从这个系统的根轨迹图,可以看出当根增益 小于2时,系统是稳定的。
评论