BUCK电路设计及原理详解


下图分别是(左)异步BUCK与 (右)同步BUCK电路示意图。
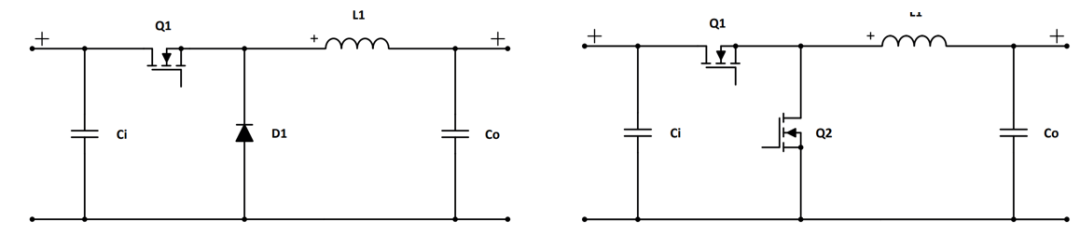
我们都知道BUCK是通过控制开关管导通和关断把输入的能量传递到输出。
同步VS异步:异步BUCK下管是二极管,同步BUCK下管为MOS管。 由于MOS的导通电阻Rds_on小(约10~20mΩ),二极管压降为0.7V左右,当续流电流有效值为10A,续流期间同步BUCK带来的导通损耗约是异步BUCK的三分之一。 因此,我们看到一般BUCK芯片如果是异步BUCK,二极管都会外置,不然芯片的损耗太大会使整体效率降低。
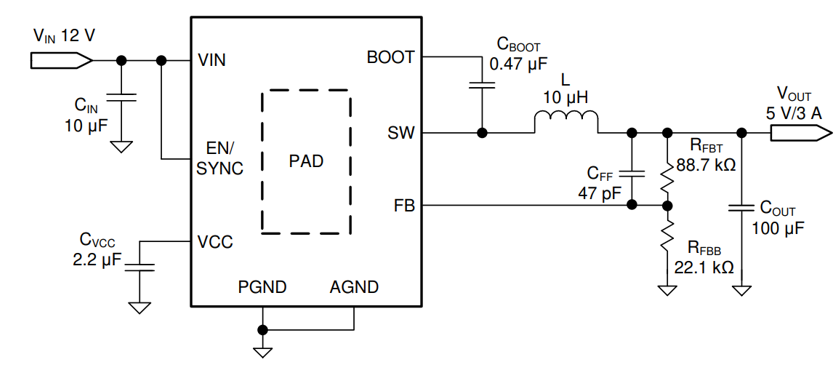
接下来我们以TI的一个36V/3A的同步BUCK -LMR23630 为例 一步步带大家了解BUCK的设计过程。
Step 1---简单看看BUCK数据手册:了解LMR23630芯片基本功能。
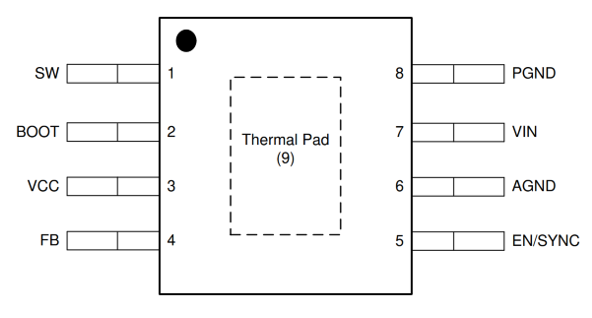
我们看SOIC-8封装左侧的四个引脚: SW、 BOOT、 VCC、 FB:
Pin1 SW:上管和下管的中点,SW接输出滤波电感后接输出电容。 一般排查BUCK工作是否OK需要看SW波形是否正常switching。
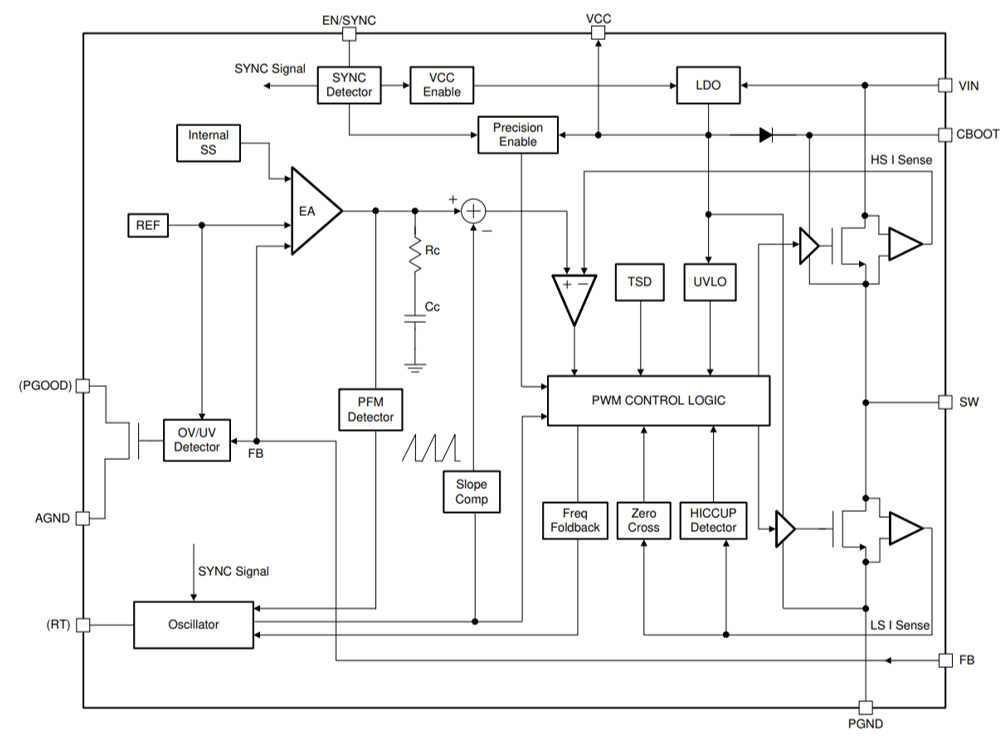
Pin2 BOOT:用来给上管关断时,DS两端提供稳定电压。 当下管断开,SW浮地,驱动打开上管需要上管的driver供电与上管DS通过CBOOT(自举电容)建立VCC的电压。 别迷糊,从block可以看到,VIN通过芯片内部LDO给上下管的driver供电,同时钳位上管DS电压,也即是说当上管的DS电压稳定后,给上管栅极一个驱动电压Vgs大于零后,上管才能打开。
Pin3 VCC:就是给内部逻辑和driver供电的LDO输出的引脚,需要加电容对地。
Pin4 FB:反馈脚,通过上篇BUCK控制模式中的PCM控制阅读后,(BUCK控制 加连接)我们知道FB是误差放大器的输入,把输出电压反馈给EA做闭环控制,因此一般BUCK在正常工作的时候,FB电压等于内部基准电压,输出电压也通过FB电压进行分压计算。
Step 2---根据典型推荐电路设计外围参数
1.输入电容CIN:
a.输入电容决定输入电压纹波ΔVin。
CIN=Iout/(4ΔVinfsw),ΔVin一般取10%Vin
b.由输入电流有效值公式:Icin_rms=Iout[D(1-D)]^0.5 可知,D=0.5时,输入电容电流的纹波最大:Icin_rms(max)=0.5Iout
因此对于CIN 选择RMS额定电流值大于0.5Iout即可。
实际案例探讨:对于建议输入电容值较大(22uF/47uF)的应用,建议采用多个输入陶瓷电容并联会让输入电容整体ESR更小,从而减小热损耗。
2.CVCC电容:
内部LDO对地的电容,越大LDO供电越稳定,意味着给MOS driver供电电源越稳定,但是太大也会让内部逻辑部分和MOS driver供电电源建立的变慢。 需要根据不同应用综合考虑。
实际案例探讨:30V转15V场合下,此时输入电容的电流在上管开通时阶跃最大,如果测试发现BUCK启动瞬间VCC对AGND超数据手册规格(4.5V),适当增加VCC对AGND电容可以有效减小VCC对GND启动时的电压尖峰。
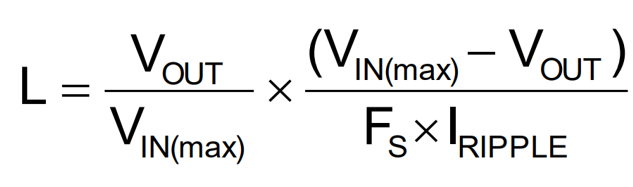
3.输出电感:
输出滤波电感用来储存能量并且对输出电流进行滤波。根据以下输出电感和输出电流纹波的公式可计算电感感值,一般IRIPPLE取10%~30%的IOUT。
实际案例探讨:Q:输出电感可不可以是数据手册建议值的10倍,20倍? 电感越大是不是电流滤波的效果越好? A:实际无论是输出电感还是输出电容都绝不是越大越好!! BUCK Bode图中,主极点由输出LC决定。 (对系统环路稳定性有懵比的朋友可以回头看 环路稳定 插入链接),简化主极点是1/[2π(LC)^0.5],当LC取值过大,会导致系统的带宽变小,响应速度变慢,大的过分甚至会导致工作异常。
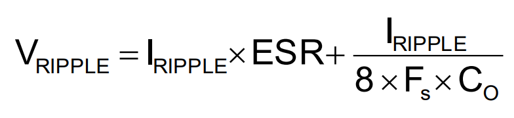
4.输出电容:
输出电容储存能量稳定电压并且对输出电压滤波,根据以下输出电容和输出电压纹波的公式可以计算电容容值,一般ESR值很小,可以忽略。
实际案例探讨:输出电容可以采用电解电容么?? 我们知道电解电容的ESR大,“衰老”的速度也比较快,占地面积也大,现在的数据手册中多数建议采用陶瓷电容。 有的数据手册并没有明确指出输出电容类型。 我们可以知道的是输出电容的建议值是降额之后的值,并且除了输出电压纹波之外其建议值和环路稳定性以及响应特性相关。 实际输出电容种类并不重要,重要的是电容容值合理,建议不超过数据手册建议值的3倍。
5.开机:
自举电容的容值决定了给上管DS和其driver 供电电源充电的时间和稳定性。 一般情况下可以预取建议值,再根据具体工况调整,CBOOT可预留一个串联的电阻位置,用来调整上管开关速度来降低EMI。
实际案例探讨:如在启动中,CBOOT对SW存在电压过冲,可以适当增大CBOOT容值,增加电源稳定性。 还可以通过串联电阻降低上管开关速度,也可以降低CBOOT对SW电压过冲。
6.CFF:
反馈电容从时域上理解即把输出更快的反馈到FB,从而增加系统响应速度。
以上理解了BUCK芯片的工作模式以及基本引脚的功能后,就可以合理灵活的设计BUCK电路。
评论