前面介绍了利用根轨迹法和频率特性法对系统进行校正。事实上,如果已知系统的模型或传递函数,通过引入某种控制器,使得闭环系统的极点可以移动到指定的位置,从而使系统的动态性能得到改善。这种方法称为极点配置法。 例6-12 有一控制系统如图6-38,其中 ,要求设计一个控制器,使系统稳定。 ,要求设计一个控制器,使系统稳定。
解:(1)校正前,闭环系统的极点:  > 0 > 0
因而控制系统不稳定。 (2)在控制对象前串联一个一阶惯性环节 , c>0,则闭环系统极点: , c>0,则闭环系统极点: 
显然,当  , ,  时,系统可以稳定。但此对参数 c 的选择依赖于 a 、 b 。因而,可选择控制器 时,系统可以稳定。但此对参数 c 的选择依赖于 a 、 b 。因而,可选择控制器  , c 、 d ,则有特征方程: , c 、 d ,则有特征方程: 当 , ,  时,系统稳定。 时,系统稳定。 本例由于原开环系统不稳定,因而不能通过简单的零极点相消方式进行控制器的设计,其原因在于控制器的参数在具体实现中无法那么准确,从而可能导致校正后的系统仍不稳定。
例6-13 已知一单位反馈控制系统的开环传递函数: 
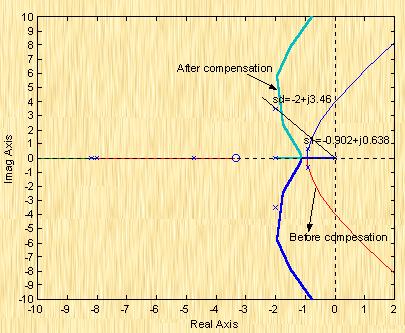
要求设计一串联校正装置Gc(s) ,使校正后系统的静态速度误差系统 ,闭环主导极点在 ,闭环主导极点在  处。 处。 解:首先,通过校正前系统的根轨迹可以发现,如图6-39所示,其主导极点为:  。 。
为使主导极点向左偏移,宜采用超前校正装置。 (2)令超前校正装置  ,可采用待定系数法确定相关参数: ,可采用待定系数法确定相关参数: 

又 

其中 、 、  、 、  、 、  为待定系数。 为待定系数。 进一步可得:  
即  

将 代入式子可以得到: , ,  , ,  , ,  。进一步可得超前校正装置的传递函数: 。进一步可得超前校正装置的传递函数: 校正后系统的根轨迹如图6-39所示。 该校正装置与例6-7中由超前装置获取的校正装置结果基本相同,说明结果是正确的。
在matlab中,亦有相应的命令可进行极点配置,主要有三个算法可实现极点配置算法:Bass-Gura算法、Ackermann算法和鲁棒极点配置算法。这些算法均以状态空间进行表征,通过设定期望极点位置,获取状态反馈矩阵K。下面通过示例介绍其中的一种算法。 例6-14 考虑给定的系统,其状态方程模型如下: 
 , ,
期望的闭环系统配置在 , ,  , ,  ,试设计其控制器。 ,试设计其控制器。 解:可以使用下面的MATLAB语句来实现极点的配置: A=[0,1,0,0;0,0,-1,0;0,0,0,1;0,0,11,0]; B=[0;1;0;-1]; eig(A)' ans = 0 0 3.3166 -3.3166 P=[-1;-2;-1+sqrt(-1);-1-sqrt(-1)]; K=place(A,B,P)
place: ndigits= 15
Warning: Pole locaTIons are more than 10% in error. K = -0.4000 -1.0000 -21.4000 -6.0000 eig(A-B*K)' ans = -1.0000 - 1.0000i -1.0000 + 1.0000i -2.0000 -1.0000 可以看出,原系统的极点位置为0、0、3.3166、-3.3166,即原系统是不稳定的,应用极点配置技术,可以将系统的闭环极点配置到某些期望的位置上,从而使得闭环系统得到稳定,并同时得到较好的动态特性。
| 

评论