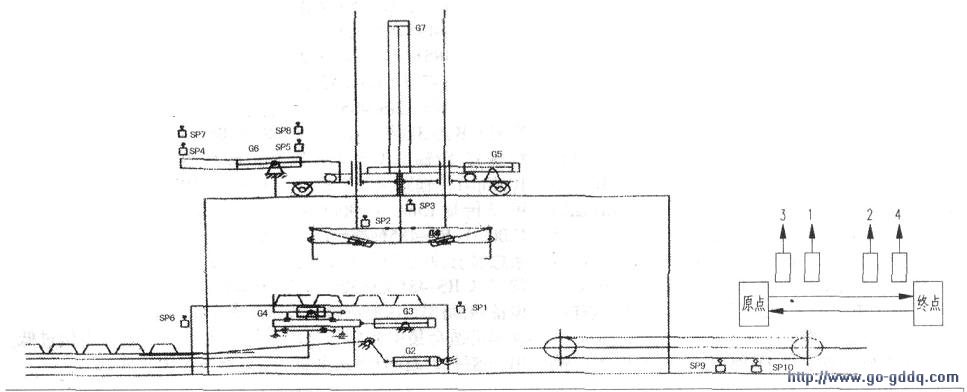
搬物机械手的上升,下降、放松,夹紧,以及前行,后行均受PLC控制。其中,前行,后行分别由双线圈两位电磁阀控制,且受接近开关信号作用,前,后行油缸可加速、减速、左右位移。机械手前,后行动作过程如上图所示。
机械手上升到位时,上升到位接近开关接通,同时左限位接开关3接通,灯亮,机械手小车前行(左移)电磁阀得电前行至接近开关l时,小车加速前行到接近开关2时,其开关接通,灯亮,便进入减速位移。
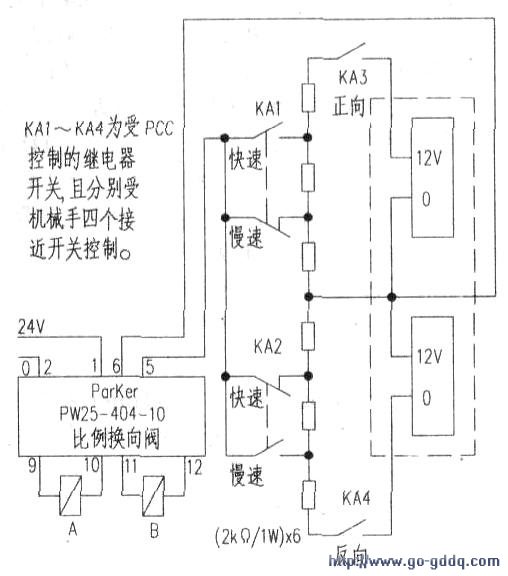
至限位开关4时,机械手停止,进入下降,待放松物料上升到位时,上升到位接近开关接通,右位(后行)接近开关4同时接通,灯亮,机械手小车便左移(后行)接近开关2时,做加速左移,到接近开关1时做减速位移,至原点接近开关3时停止。至此,机械手小车完成一个前,后行动作周期,其电气控制电路如中图所示。
在使用过程中,Rarkt这块儿常出故障,且其价格很高(德国进口)。经测.Parker输出端(9)、(10)脚,(11)、(12)脚分别为直流24V,(9)、(10)脚为前行线圈供电,(11)、(12)脚为后行线圈供电。
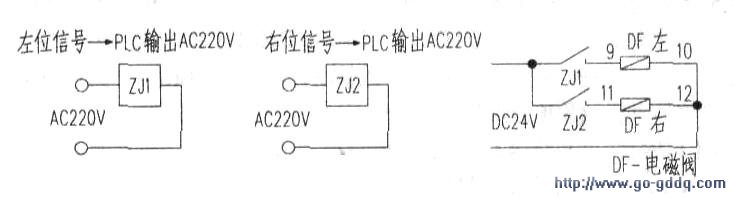
经分析,用节流阀控制油缸速度,拆下接近开关l、接近开关2,并对Parke这块儿简单改造(由下图替代中图),这样,机械手前、后行动作非常理想,速度可任意控制,运行平稳、动作可靠,造后的电路,简单、可靠、费用低。


评论