
1、控制方案设计
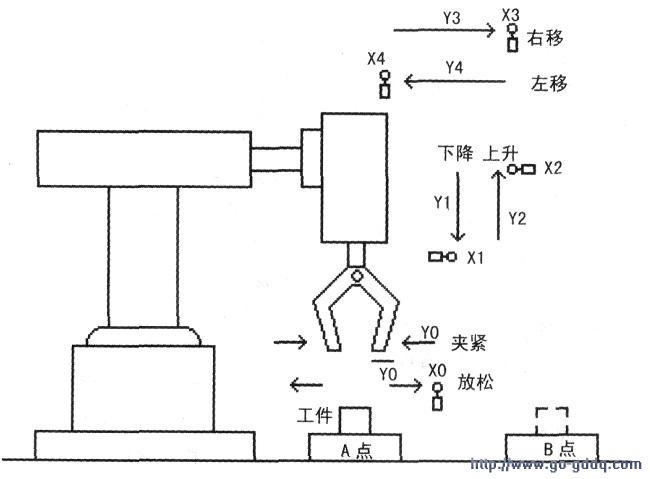
上图是某机械手工作过程的示意图。机械手控制系统有三个工作模式,分别是:“单步检测”、“返回原位”和“自动运行”。机械手在“自动运行”所做的一个单循环动作是:从原点下降到A点,夹紧工件,上升,右移,下降到B点,放松工件,上升,左移回到原点。而“单步检测”模式又有三个选项:“右移”、“下降”和“夹/放”。其中“夹/放”所做的动作是:夹紧工件,上升,下降,放松工件。“返回原位”模式的功能是在做了检测后,无论机械手处于什么位置,都能使其返回原位。
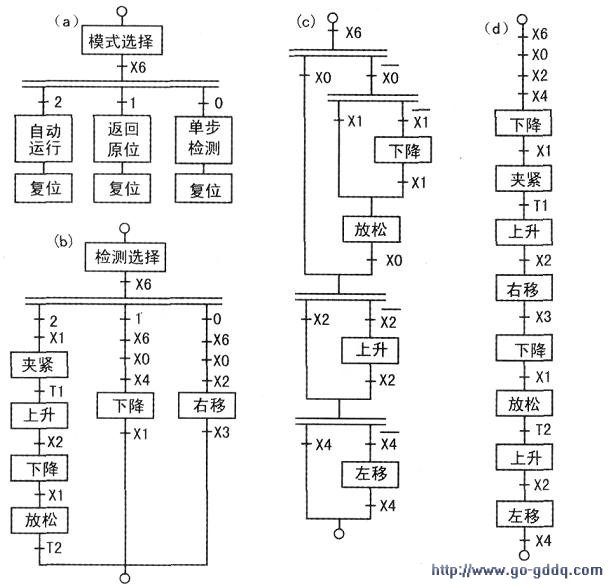
根据这些工况,笔者绘制了机械手整体及“单步检测”、“返回原位”、“自动运行”三个模式的状态转移图,分别见下图的(a)、(b)、(c)、(d)。
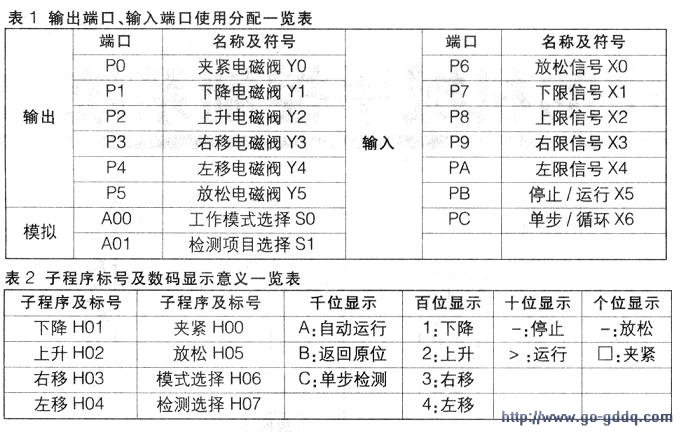
为了方便读者阅读.将PLLlG控制器的输出口、模拟量输入口、开关最输入口的使用分配情况列于表1.而控制系统内的各子程序标号及仪表板数码显示的意义则列于表2。
2、流程图
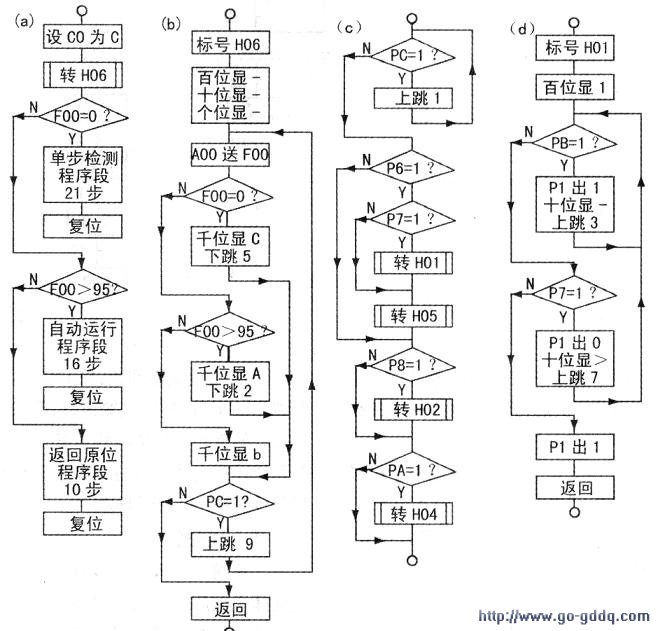
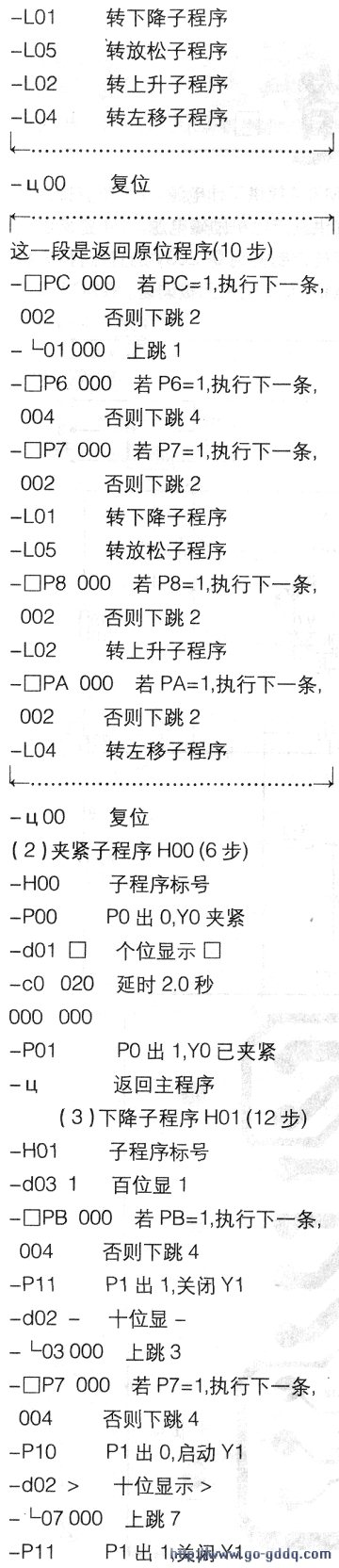
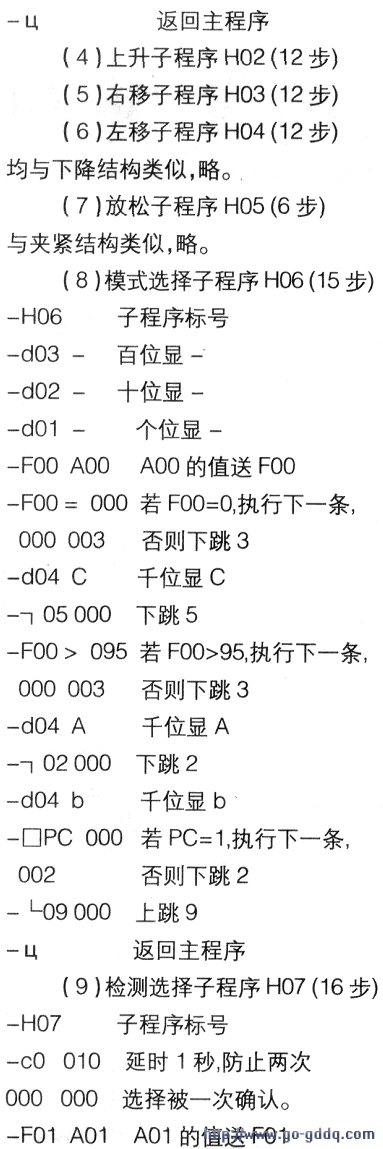
“系统工作模式切换程序”、“模式选择子程序( H06)”、“返回原位程序”、“下降控制子程序( H01)”的流程图分别见下图 (a)、(b)、(c)、(d)。这四个流程图是笔者选出的较有代表性的流程图。其它程序的流程图有的与它们类似,如“上升控制”、“右移控制”、“左移控制”流程图均与“下降控制”类似,而“单步检测切换程序”、“检测项目选择子程序( H07)”的流程图的结构则分别与“系统工作模式切换程序”、“模式选择子程序( H06)”类似;还有一些程序的结构很简单,如“自动运行程序”、“夹紧”、“放松”等,都是些顺序结构,这里就不再画出了。
需要说明的是,在“下降控制”中,设计了一个“运行/停止”开关(符号X5,接在PB口),这个开关在“上升控制”、“右移控制”、“左移控制”中也同样使用,这样就可使机械手在任何情况下都能停下来,提高了安全可靠性。
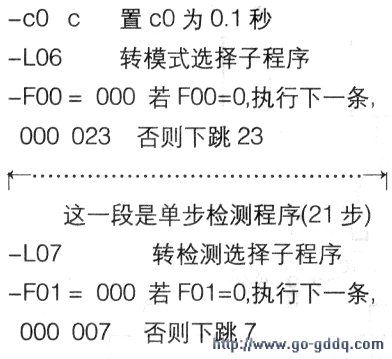
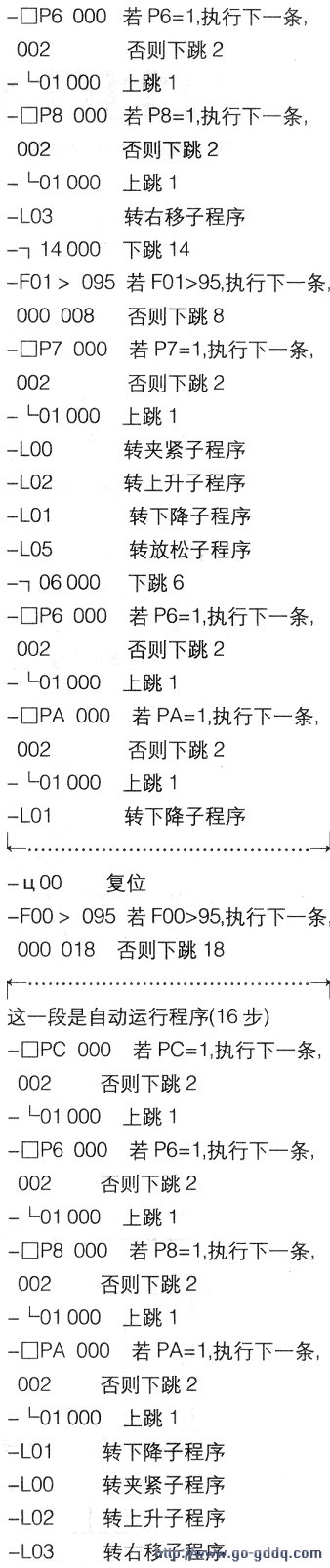
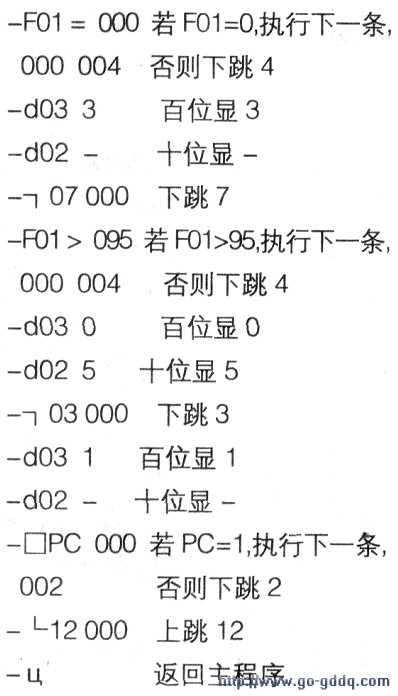
3、程序及注释
注:一条指令超出2字节,从第3或第4字节起换行书写。
(1)工作模式选择与切换(共54步)注:包含三个工作模式的程序。
4、其它说明
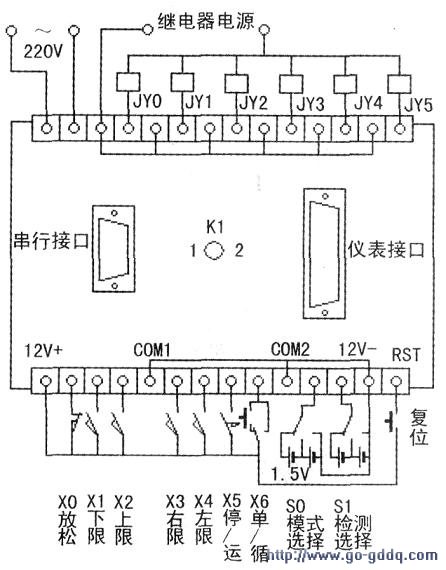
(1)图4是实验模型的接线图,按图接入输入开关信号即可实验。
(2)夹紧/放松采用双螺线管电磁阀,YO得电夹紧,Y5得电放松,失电保持原状。下降/上升、右移/左移亦采用双螺线管电磁阀,得电移动,失电止住。因P111G输出继电器触点的额定电流只有1A,故需要用外接继电器间接控制。
(3)放松信号取自机械手限位开关XO的常闭触点,机械手放松时.XO闭合。其它限位信号均为机械手限位开关的常开触点。
(4)停止/运行开关采用小型可锁定开关,开关揿入呈闭合时为运行状态。单步/循环开关采用小型双位开关与按钮的组合,在单步状态下,每次模式选择、检测选择都要用按钮确认。
(5)模式、检测选择控制都是用一个三位开关及两节1.5V电池组合而成。1.5V电压输入模拟口产生的数字信号的值为75,如下图所示,将开关拨至不同位置,电压就会不同,产生的数字信号也不同,用程序中的判断条件,就可以达到选择目的。
本程序在P111G-MC2上已通过运行验证。

评论