首页->机器人
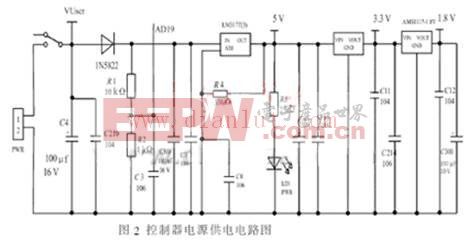
机器人控制器电源供电电路 ......
......
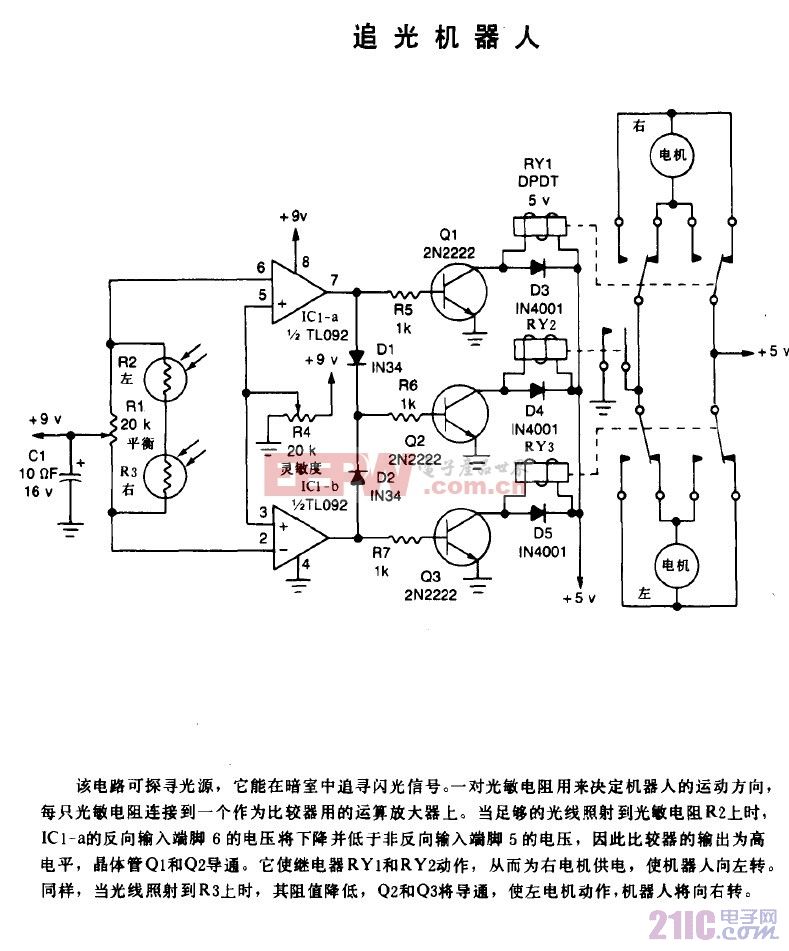
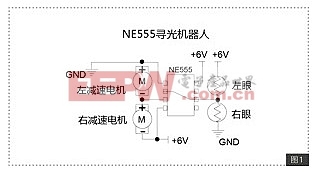
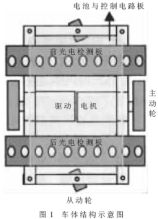
在日常生活和学习中充斥着高新技术的今天,“低技术”表达的是回归自然和传统,去挖掘人类早已拥有的聪明才智。低技术不要求我们一味地追求技术的尖端化,但其所展现的科技成果和科学理念同样精彩。本文将通过一部寻光机器人的制作,向大......
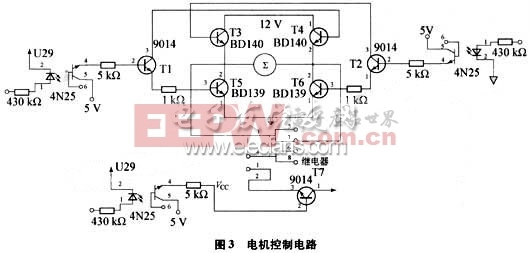
电机控制电路采用大功率对管BDl39、BDl40组成的H型驱动电路,通过单片机产生占空比不同的PWM脉冲,精确调整电机的转速。这种电路由于工作在晶体管饱和或截止状态,避免了在线性放大区工作时晶体管的管耗,可以最大限度地提......
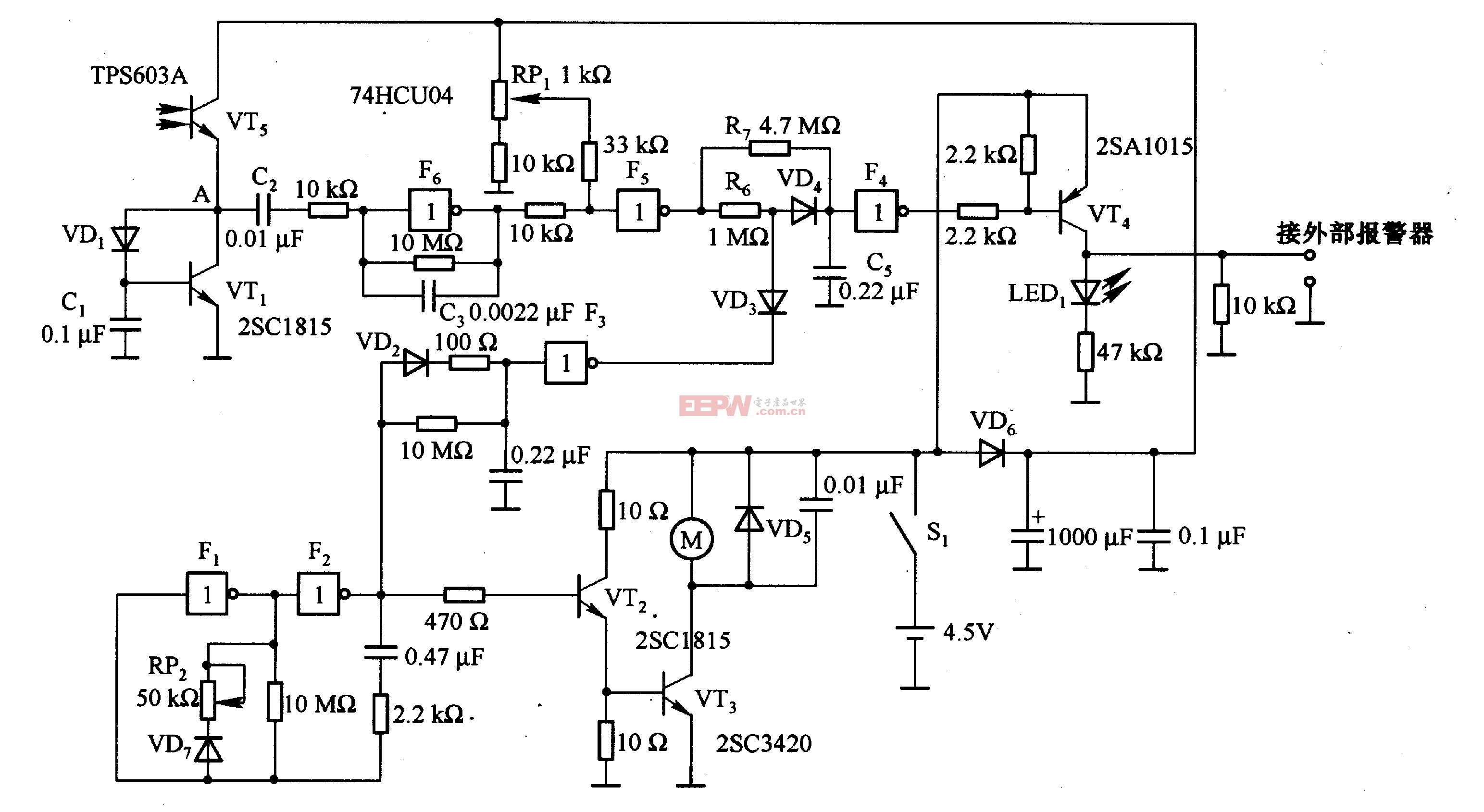
图2-35是机器人监视电路。电路中,VT5为输人电路,采用光电晶体管TPSA6O3A,VT5中电流大小随环境明暗程度不同而变化。若VT5的发射极接电阻,VT5检测光变化的灵敏度就会降低。为此,电路中接入VTl晶体管,A......
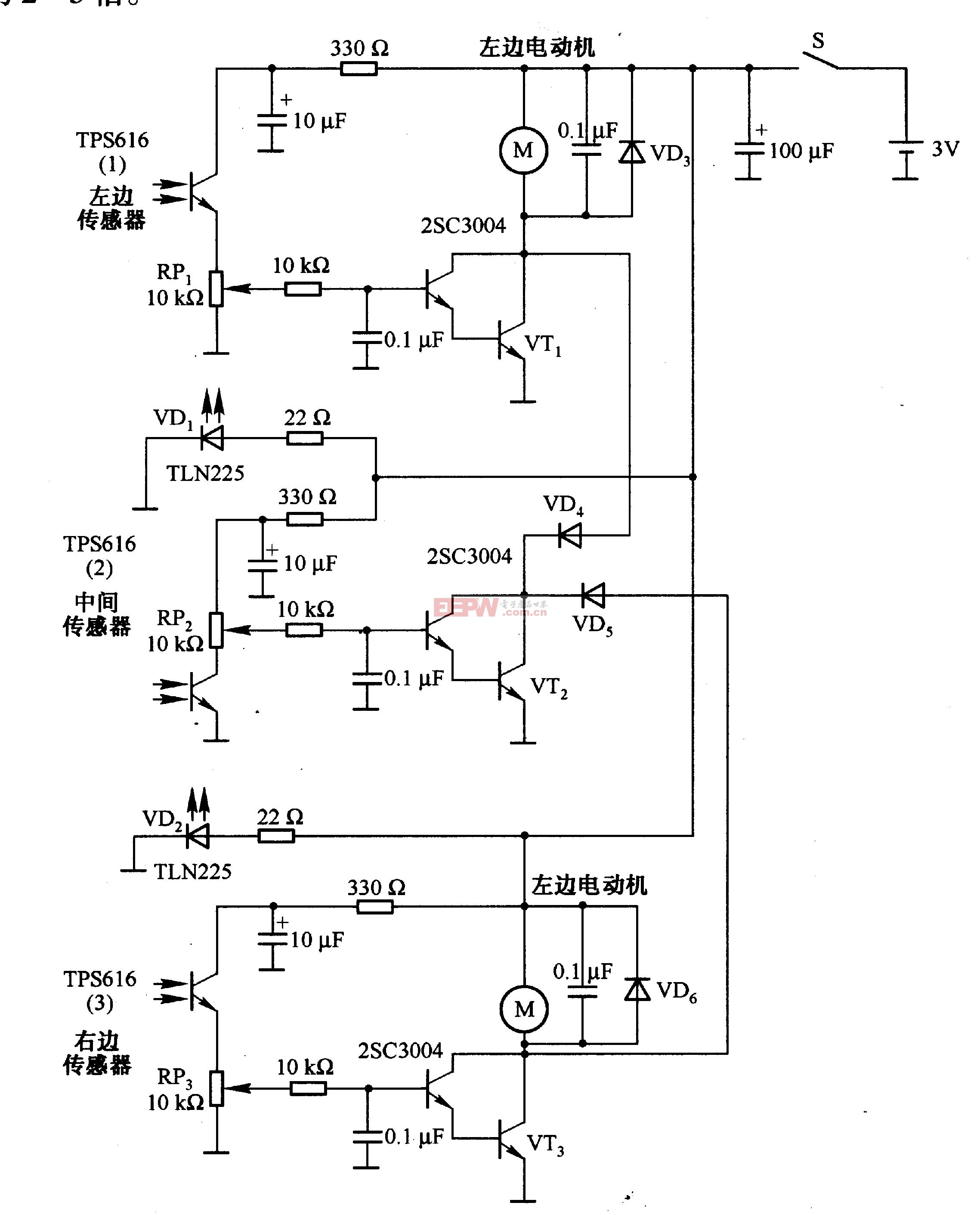
图2-34是机器人跟踪电路。电路中,TPS616(1)、TPS616(2)和TPS616(3)分别是左边、中间和右边光的接收传感器,它们是带有可见光截止滤光器滤光电晶体管。若TPS616的灵敏度不够时,可采用TPS6......
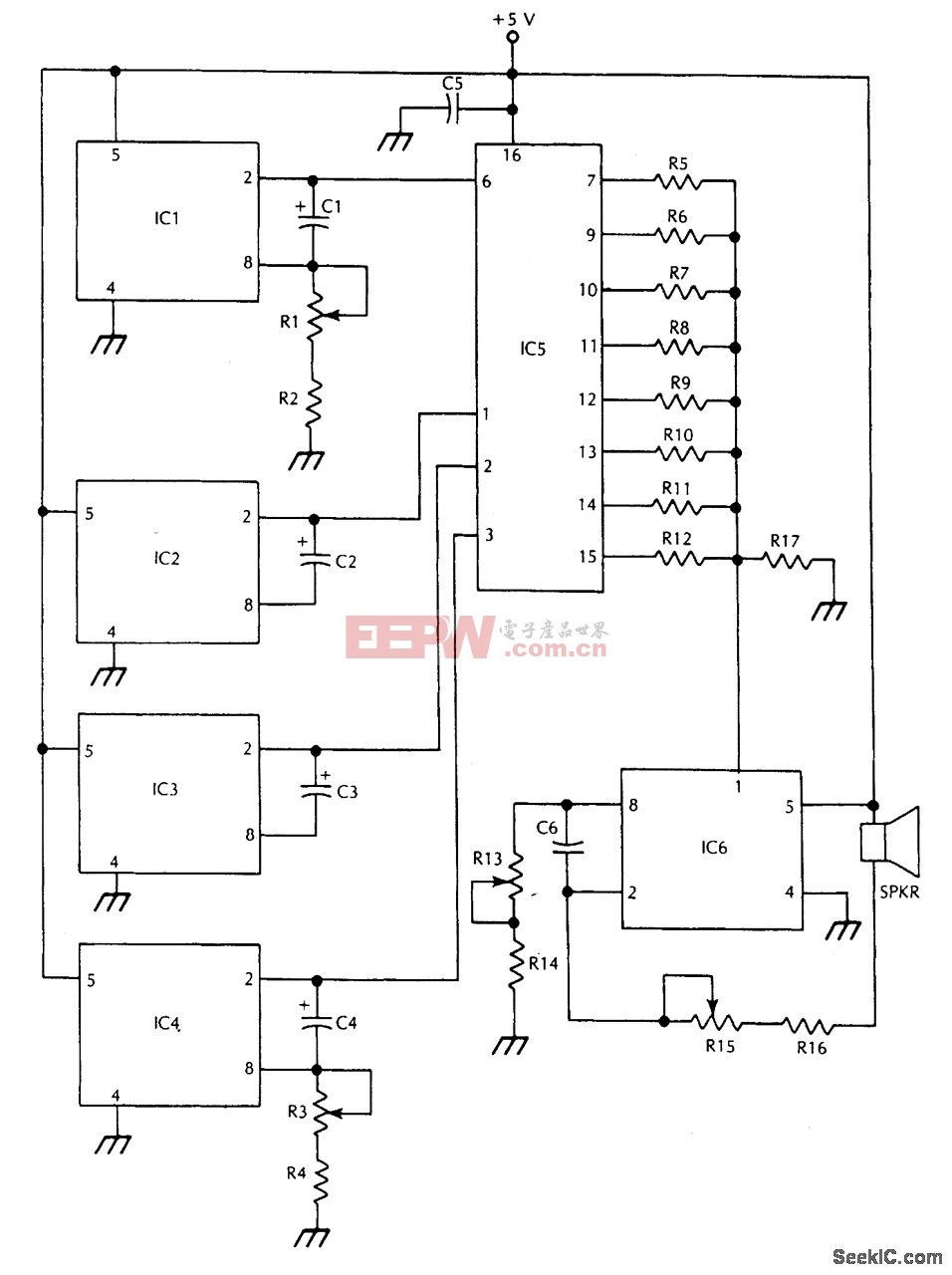
这个电路可模仿机器人的声音效果,可用于新奇的玩具中。......
大范围内变化。 (2)设置指针cur_step[8]指向8个电机当前处在脉冲序列step[8]中的位置。 易知:0=step[i]=7,其中,i分别代表8个电机。组数据(需占用1.5K存储空间,AT89C52足够)。如......
在最近的机器人比赛和电子设计竞赛中,较多参赛题目要求机器人沿场地内白色或黑色指引线行进。一些研究人员提出了基于寻线的机器人设计策略,主要是关注指引线的检测,但对于机器人的整体设计未做说明。本文在总结此类赛事的基础上,提出......

 dolphin 2012-11-22
dolphin 2012-11-22
 dolphin 2012-07-30
dolphin 2012-07-30
 dolphin 2012-07-24
dolphin 2012-07-24
 dolphin 2012-07-24
dolphin 2012-07-24
 dolphin 2011-07-29
dolphin 2011-07-29
 dolphin 2011-05-11
dolphin 2011-05-11