晶闸管调速电路图大全(包括LM324\\晶闸管无级调光调速电路原理图)


晶闸管调速电路图(一)
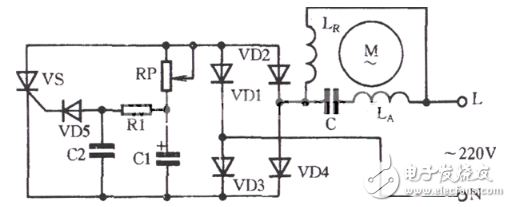
如图,调节电位器RP即可调节晶闸管的导通角,改变输出电压,从而达到无级调节电动机转速的目的。RP阻值小,VS导通角度大,输出电压高,电动机转速高;反之,RP阻值大,电动机转速低。
晶闸管调速电路图(二)
为了提高直流调速系统的动静态性能指标,通常采用闭环控制系统(包括单闭环系统和多闭环系统)。对调速指标要求不高的场合,采用单闭环系统,而对调速指标较高的则采用多闭环系统。按反馈的方式不同可分为转速反馈,电流反馈,电压反馈等。在单闭环系统中,转速单闭环使用较多。
在本装置中,转速单闭环实验是将反映转速变化的电压信号作为反馈信号,经“速度变换”后接到“速度调节器”的输入端,与“给定”的电压相比较经放大后,得到移相控制电压UCt,用作控制整流桥的“触发电路”,触发脉冲经功放后加到晶闸管的门极和阴极之间,以改变“三相全控整流”的输出电压,这就构成了速度负反馈闭环系统。电机的转速随给定电压变化,电机最高转速由速度调节器的输出限幅所决定,速度调节器采用P(比例)调节对阶跃输入有稳态误差,要想消除上述误差,则需将调节器换成PI(比例积分)调节。这时当“给定”恒定时,闭环系统对速度变化起到了抑制作用,当电机负载或电源电压波动时,电机的转速能稳定在一定的范围内变化。
在电流单闭环中,将反映电流变化的电流互感器输出电压信号作为反馈信号加到“电流调节器”的输入端,与“给定”的电压相比较,经放大后,得到移相控制电压UCt,控制整流桥的“触发电路”,改变“三相全控整流”的电压输出,从而构成了电流负反馈闭环系统。电机的最高转速也由电流调节器的输出限幅所决定。同样,电流调节器若采用P(比例)调节,对阶跃输入有稳态误差,要消除该误差将调节器换成PI(比例积分)调节。当“给定”恒定时,闭环系统对电枢电流变化起到了抑制作用,当电机负载或电源电压波动时,电机的电枢电流能稳定在一定的范围内变化。
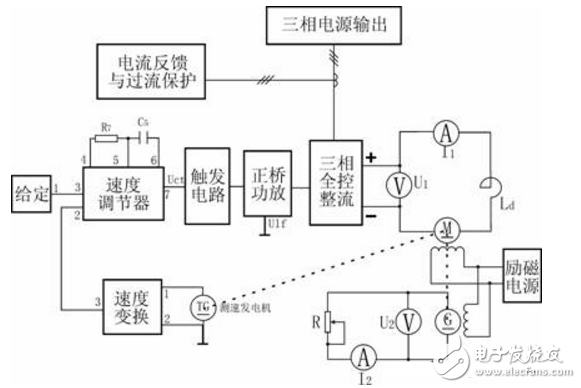
图1 转速单闭环系统原理图
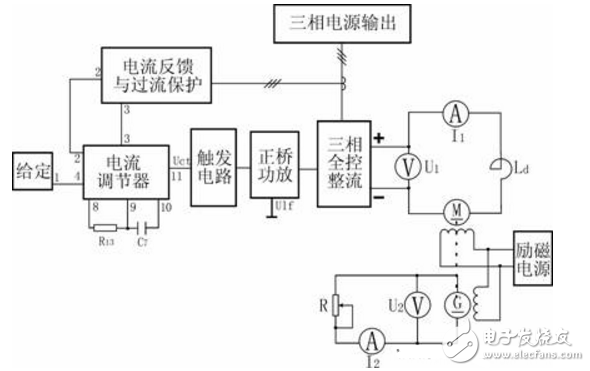
图2 电流单闭环系统原理图
晶闸管调速电路图(三)
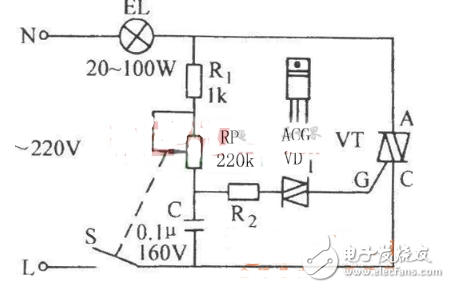
晶闸管无级调光调速电路图
晶闸管调速电路图(四)
晶闸管调速器电路如图9-13所示,是广泛应用于小型直流电动机调速的控制电路。调速器电路主要由电压给定环节、触发脉冲环节、电压和电流反馈环节及主回路和励磁部分组成。电路中采用了电流正反馈和电压负反馈环节来代替测速发电机进行电枢电压无级调速。
其工作原理如下
(1)主电路【图9-13(a)部分】
主电路为单相半控桥式全波整流电路,220V交流电源经整流后,成为直流电动机调压调速电源。为防止晶闸管在接通和断开过程中产生过电压,在晶闸管V16和V17两端分别并接着由电阻R18和电容C8、R19和C9串联组成的阻容保护装置;由于主电路中串接电抗器L,使主回路负载电流连续,并减小了电流脉动;为保证晶闸管可靠换向而不失控,并接在电动机两端的续流二极管V20为电动机提供了放电回路;电阻R16是电动机的能耗制动电阻,在电动机正常运转时,由于接触器KM的常闭触点断开,R16并没有接入主电路,只有停车时接触器KM断电,常闭触点闭合,R16才接入主电路,使电动机进行能耗制动;R13是电流正反馈电阻,R12、R14、RP3组成了电压负反馈支路。
(2)电动机励磁【图9-13(b)部分】
电动机励磁绕组电压是由单相桥式整流电路供电的。为了防止励磁电流小而造成飞车,励磁回路中串接有零电流检测继电器KA,当励磁电流小到某一值时,KA释放,其联锁触点控制主接触器KM断电,使电动机M立即停转。
(3)给定回路【图9-13(c)部分】
变压器TC二次侧40V电压、整流桥VC2、给定电位器RP组成了给定电压回路。通过调节RP,可改变给定电压魄的大小,从而改变电动机M转速的高低。
(4)触发脉冲电路【图9-13(d)部分】
该触发器采用单结晶体管构成简单的触发电路,由变压器TC、变压器TC二次侧70V电压、整流、削波、放大、RC回路及脉冲形成输出等环节组成。变压器TC输出70V电压经VC1整流和稳压管V1限幅削波后,输出梯形波,作为触发电路的同步电压。梯形波再经过电容C5滤波后得到约为11V的放大器直流电源电压。二极管V5的作用是将一个电源隔离成两种电压。晶体管V10的电路为电流反馈放大器,其射极电阻R10很大,使放大电路获得较好的线性特性。当有正向信号电压加到V10的基极时,其集电极电压随着信号的增大而降低,晶体管V7中流过的电流也随着V10集电极电位的变化而变化,相当于V7管集射极之间的等效电阻也在改变,起到了可变电阻的作用,使电容C2的充电速度也相应跟随改变,从而达到触发脉冲移相的目的。当C2的充电电压UC2达到单结晶体管V6的峰点电压UP时,V6导通,电容C2通过电阻R3急速放电,使脉冲功率放大三极管V4导通,其作用是把前级的尖脉冲放大,由脉冲变压器TC1输出一个具有一定幅值、宽带和陡度的脉冲到晶闸管控制极,使晶闸管V16和V17触发。随着C2放电,UC2迅速下降到V6的谷点电压Ur时,V6截止,电容C2又重新充电,重复上述过程。因此,只要改变输入信号电压Ug的大小,即可改变电容C2充电到UP的时间,就可改变产生第一个脉冲的时间,从而改变晶闸管导通角a的大小,达到改变电动机电枢电压调速的目的。通过上述调节,电动机能获得大约12:1的调速比。V3是保护V4管的,当V4截止时,变压器TC1的原边会产生感应电动势,可通过V3进行放电,从而防止V4损坏。R2是温度补偿电阻。
系统中采用了电流正反馈和电压负反馈环节,反馈电压分别从电阻R13和电位器RP3取出后与调速给定电位器RP及转速下限调节电位器RP2上的给定电压比较后,加到放大器V10的基极。当负载波动电流增大时,电动机电枢电压下降,转速降低,电压负反馈减小,而电流正反馈电压增大,使综合给定电压增加,触发脉冲前移,晶闸管导通角α增大,电动机电枢电压上升,并使电动机转速上升,从而保证了电动机转速不因负载变化而变化,使电动机有足够的机械硬特性。
(5)保护环节【图9-13(e)部分】
为了防止电动机在启动及过载的情况下出现过电流,系统中还设有电流截止反馈环节,是由R13、RP4、V9和V8等元件组成的,当电动机的电流超过规定允许值时,从电位器RP4上取出一个与电动机电流大小成比例的电流信号,经稳压管V9加于三极管V8的基极,使V8导通,其集射极间的电阻急剧下降,将电容器C2旁路,使单结晶体管V6无脉冲输出,晶闸管在无触发脉冲信号下立即处于关断状态,从而达到限流的目的。
另外,为了限制电动机启动时的电流冲击,在V10的输入端并联有电容C4,可使电动机缓慢肩动。为了防止电动机在过渡过程中出现的过电压,在V10的输入端还并接有限幅用的二极管V11、V12、V13,防止V10管损坏。
(6)电源进线【图9-13(f)部分】
电源可直接取自220V电网,在电源两端并接着由电阻R17和C7串联组成的阻容保护装置,防止电源或负载侧输入过电压。熔断器FU为进线电源短路保护。
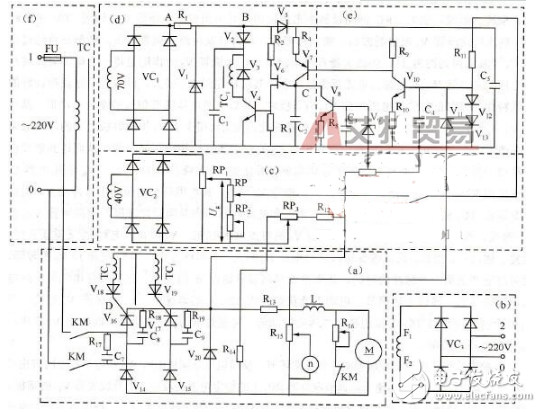
图9-13晶闸管调速器电路
晶闸管调速电路图(五)
由下图可见该系统的控制对象是直流电动机M,被控量是电动机的转速n,晶闸管触发及整流电路为功率放大和执行环节,由运算放大器构成的比例调节器为电压放大和电压(综合)比较环节,电位器RPl为给定元件,测速发电机TG与电位器RP2为转速检测元件。

晶闸管调速电路图(六)
基于LM324的PWM直流电机调速电路图
它主要由U1(LM324)和Q1组成。
图1中,由U1a、U1d组成振荡器电路,提供频率约为400Hz的方波/三角形波。U1c产生6V的参考电压作为振荡器电路的虚拟地。这是为了振荡器电路能在单电源情况下也能工作而不需要用正负双电源。U1b这里接成比较器的形式,它的反相输入端(6脚)接入电阻R6、R7和VR1,用来提供比较器的参考电压。这个电压与U1d的输出端(14脚)的三角形波电压进行比较。当该波形电压高于U1b的6脚电压。U1b的7脚输出为高电平;反之,当该波形电压低于U1b的6脚电压,U1b的7脚输出为低电平。由此我们可知,改变U1b的6脚电位使其与输入三角形波电压进行比较。就可增加或减小输出方波的宽度,实现脉宽调制(PWM)。电阻R6、R7用于控制VR1的结束点,保证在调节VR1时可以实现输出为全开(全速或全亮)或全关(停转或全灭),其实际的阻值可能会根据实际电路不同有所改变。
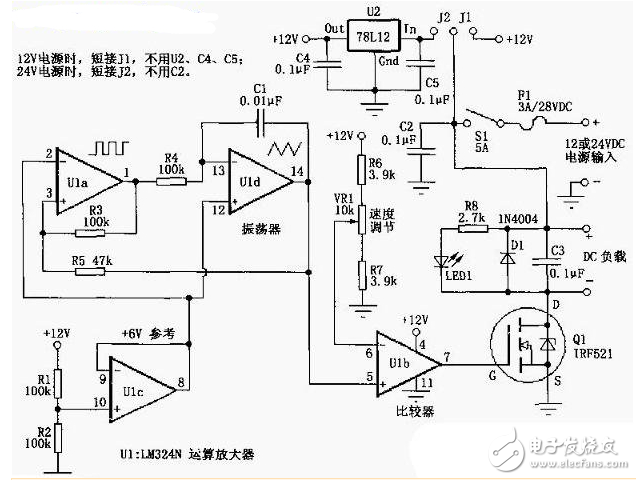
图1中,Q1为N沟道场效应管,这里用作功率开关管(电流放大),来驱动负载部分。前面电路提供的不同宽度的方波信号通过栅极(G)来控制Q1的通断。LED1的亮度变化可以用来指示电路输出的脉冲宽度。C3可以改善电路输出波形和减轻电路的射频干扰(RFI)。D1是用来防止电机的反电动势损坏Q1.
当使用24v的电源电压时,图1电路通过U2将24V转换成12V供控制电路使用。而Q1可以直接在21v电源上,对于Q1来讲这与接在12v电源上没有什么区别。参考图1,改变J1、J2的接法可使电路工作在不同电源电压(12V或24V)下。当通过Q1的电流不超过1A时,Q1可不用散热器。但如果Q1工作时电流超过1A时,需加装散热器。如果需要更大的电流(大于3A),可采用IRFZ34N等替换Q1.
评论