
织布机控制器电路图

本例介绍的织布机控制器采用触摸式起动方式,它在织布机电动机空载时,延时30s后断电,使其停转,避免电动机频繁起动:在电动机绕组温度偏高至一定值时,控制器的过热保护电路动作,使电动机停转。
电路工作原理
该织布机控制器电路由触摸控制电路、光控电路、过热保护电路、工作状态指示电路和控制执行电路组成,如图所示。
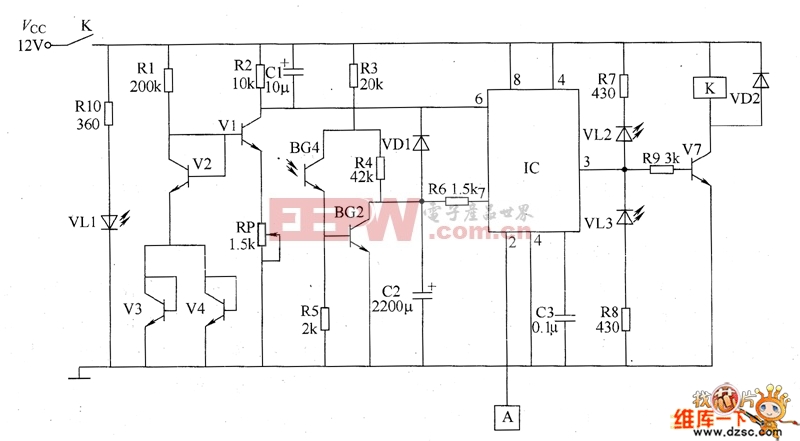
触摸控制电路由触摸电极片A和时基集成电路IC的2脚内电路组成。
光控电路由红外发射二极管VL1、红外光敏晶体管V5、晶体管V6、电阻器R10与R3~R6和IC的7脚内电路组成。
过热保护电路由晶体管V1~V4、二极管VD1、电阻器R1与R2、电容器C1与C2、电位器RP和IC的6脚内电路组成。
控制执行电路由晶体管V7、继电器K、电阻器R9和二极管VD2组成。
工作状态指示电路由电阻器R7、R8和发光二极管VL1、VL2组成。
刚接通电源开关S时,由于C1的作用,IC的6脚电压高于2Vcc/3,IC的3脚输出低电平,K不吸合,织布机的电动机(电路中未画出)不运转。
当用手触摸电极片A时,人体感应的杂波信号使IC内电路受触发而翻转,IC的3脚输出高电平,使K吸合,织布机电动机通电运转(K的常开触头通过控制交流接触器来控制电动机)。
若织布机电动机处于空载(未织布),则织布机的运动机构将VL1发射的红外光挡住,V5接收不到红外光而处于截止状态,V6也无法导通,Vcc电压通过R3、R4对C2充电。约30s左右,当C2两端电压高于2Vcc/3时,IC的3脚变为低电平,使K释放,C2通过R6对IC的7脚内电路放电,为下次起动作准各,完成织布机空载延时停机功能(延时30s相当于处理织布机故障所需时间)。
若织布机在电动机起动运转后开始织布,则V5受VL1发出的红外光照射而导通,使V6导通,C2正端为低电平,织布机电动机正常运转工作。
V3和V4作为温度检测器件,安装在电动机的定子绕组上,用来检测电动机绕组的温度。在电动机绕组的工作温度低于120℃时,V3和V4的导通能力较弱,V1处于截止状态,V2导通,IC的6脚为低电平(低于2Vcc/3),织布机电动机正常工作。若电动机绕组的工作温度超过120℃时,V3和V4受热后导通能力增强,使V1导通,V2截止,IC的6脚电压高于2Vcc/3,3脚输出低电平,使V7截止,K释放,织布机电动机停止运转,从而达到了电动机过热保护的目的。
在接通S后,VL2在织布机电动机停转时点亮, VL3在织布机电动机运转时点亮。
元器件选择
R1~R10选用1/4W碳膜电阻器或金属膜电阻器。
RP选用密封式可变电阻器。
C1和C2均选用耐压值为25V的铝电解电容器;C3选用独石电容器或涤纶电容器。
VD1选用2AP9或2AP10型锗普通二极管;VD2选用1N4007型硅整流二极管。
VL1选用HC411型红外线发光二极管;VL2和VL3均选用Φ3mm的普通发光二极管。
V1~V4和V6均选用3DC6或3DG201、59013型硅NPN晶体管;V5选用3DU3B型红外.光敏晶体管:V7选用C8050或58050、3DG12型硅NPN晶体管。
IC选用NE555时基集成电路。
K选用JQX-19等型号的12V直流继电器。
电路调试
电路安装完毕后,接通12V电源,调节RP的阻值,使IC的6脚电压在常温下为6.5V左右即可。
评论