
ULN2003在自动延迟电路中的应用
采用接口芯片ULN2003,对碎矿皮带运输系统的自动延迟电子程序控制电路进行了改造,整个电路十分简单、成本低、体积小、维修调试十分简单方便。
1、电路原理
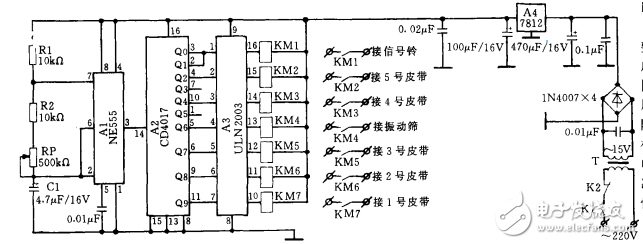
自动延迟电子程序控制电路见图。当皮带运输系统破碎机开车后,破碎机电动机运行接触器K1的辅助触点闭合,使自动延迟电子程序控制电路板接通电源,经降压变压器T、桥式整流和三端稳压集成电路A4后,提供稳定的12v直流工作电压。12V电压经电阻Rl和R2、电位器RP向电容Cl充电,通过C1的充放电,由集成电路A1组成了多谐振荡器,在A1脚3输出矩形脉冲,调整Rl〕阻值,使之每15s输出一个脉冲信号,送至一f一进制脉冲计一数/分配的A2时钟输人端脚14,于是A2输出端Q0一Q9就依次输出高电平。当A1脚3输出第一个脉冲时,A2的伪端输出高电平,直接送人接口芯片A3输人端脚1,输出端脚16直接驱动小型继电器KM1吸合,信号铃响,告知皮带运输系统准备开车。由于Q1与Q0相联,使信号铃响为30s,各岗位人员作好准备。当A1脚3输出第三个脉冲时,A2的Q1端输出高电平,KM2吸合,5号皮带电动机起动运行。Q3端空置,仍端输出高电平时,4号皮带电动机起动运行。通过A2十个输出端的编程,使各条皮带和振动筛按系统的要求开车运行。
2、元件选择
A3是16脚双列直插、型号为ULN2003接口芯片,每路负载能力最大为500mA、50V。在集成电路块内有续流二极管,能保证与感性负载连接时`使用安全。也可用MC1413直接代换ULN2003,这时,最大负载能力为350mA、4OV。KM1一KM7选用JXQ一lO小型通用继电器。该继电器触点容量大,性能稳定可靠,采用大八脚安装,更换继电器十分方便。C1选用钮铝电解电容器。
3、安装与调试
该电路集成块均采用插座安装:A1为8PIN型,A2和A3均为16PIN型插座,这样更换集成电路十分方便。A4无须加装散热片,可直接焊在电路板,并卧贴于电路底板上。整个电路板体积十分小巧,装人游戏节目卡的壳内,用1脚线路插座与其连接,使电路板防尘、防潮,提高可靠性。
本电路调试十分简单,仅调整RP的阻值,使延迟时间为15s即可。
RP调整好以后,应该选用相同阻值的金属膜固定电阻焊人电路板,以保证电路工作的准确、稳定性。

1、电路原理
自动延迟电子程序控制电路见图。当皮带运输系统破碎机开车后,破碎机电动机运行接触器K1的辅助触点闭合,使自动延迟电子程序控制电路板接通电源,经降压变压器T、桥式整流和三端稳压集成电路A4后,提供稳定的12v直流工作电压。12V电压经电阻Rl和R2、电位器RP向电容Cl充电,通过C1的充放电,由集成电路A1组成了多谐振荡器,在A1脚3输出矩形脉冲,调整Rl〕阻值,使之每15s输出一个脉冲信号,送至一f一进制脉冲计一数/分配的A2时钟输人端脚14,于是A2输出端Q0一Q9就依次输出高电平。当A1脚3输出第一个脉冲时,A2的伪端输出高电平,直接送人接口芯片A3输人端脚1,输出端脚16直接驱动小型继电器KM1吸合,信号铃响,告知皮带运输系统准备开车。由于Q1与Q0相联,使信号铃响为30s,各岗位人员作好准备。当A1脚3输出第三个脉冲时,A2的Q1端输出高电平,KM2吸合,5号皮带电动机起动运行。Q3端空置,仍端输出高电平时,4号皮带电动机起动运行。通过A2十个输出端的编程,使各条皮带和振动筛按系统的要求开车运行。
2、元件选择
A3是16脚双列直插、型号为ULN2003接口芯片,每路负载能力最大为500mA、50V。在集成电路块内有续流二极管,能保证与感性负载连接时`使用安全。也可用MC1413直接代换ULN2003,这时,最大负载能力为350mA、4OV。KM1一KM7选用JXQ一lO小型通用继电器。该继电器触点容量大,性能稳定可靠,采用大八脚安装,更换继电器十分方便。C1选用钮铝电解电容器。
3、安装与调试
该电路集成块均采用插座安装:A1为8PIN型,A2和A3均为16PIN型插座,这样更换集成电路十分方便。A4无须加装散热片,可直接焊在电路板,并卧贴于电路底板上。整个电路板体积十分小巧,装人游戏节目卡的壳内,用1脚线路插座与其连接,使电路板防尘、防潮,提高可靠性。
本电路调试十分简单,仅调整RP的阻值,使延迟时间为15s即可。
RP调整好以后,应该选用相同阻值的金属膜固定电阻焊人电路板,以保证电路工作的准确、稳定性。

评论