
基于新唐 M452的四轴无人机控制板


方案概述
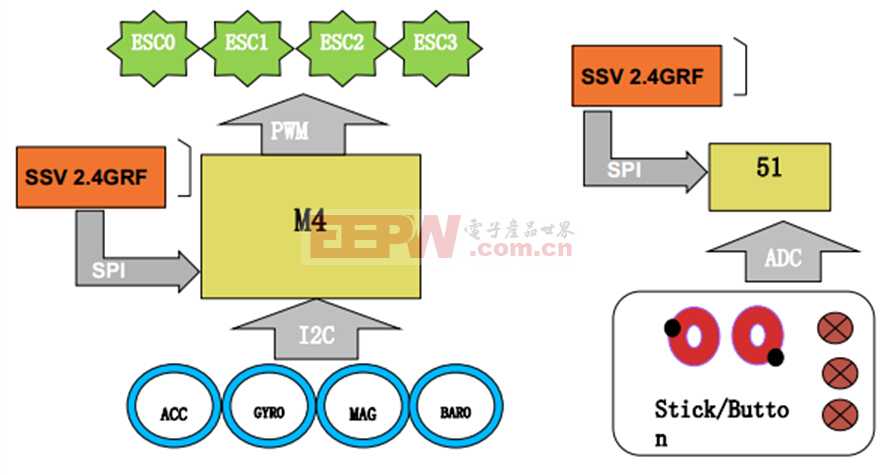
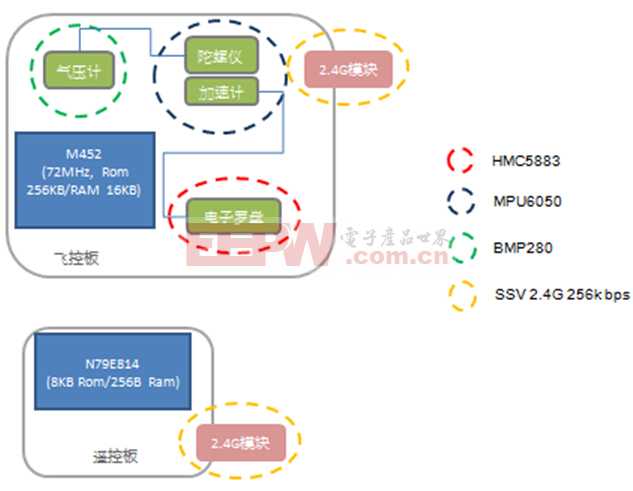
四轴飞行器是一种利用四个旋翼作为飞行引擎来进行空中飞行的飞行器,进入20世纪以来,电子技术飞速发展四轴飞行器开始走向小型化,并融入了人工智能,使其发展趋于无人机,智能机器人。四轴飞行器不但实现了直升机的垂直升降的飞行性能,同时也在一定程度上降低了飞行器机械结构的设计难度。四轴飞行器的平衡控制系统由各类惯性传感器组成。在制作过程中,对整体机身的中心、对称性以及电机性能要求较低,这也正是制作四轴飞行器的优势所在,而且相较于固定翼飞机,四轴也有着可垂直起降,机动性好,易维护等优点。新唐主控板采用采用新唐 32 bit Cortex®-M4 M452 微控器,支持失控保护(自动降落),通过控制电调达到飞行目的,同时通过2.4G专用遥控模块与遥控把手通信。M452强大的运算能力,将10轴传感器运算结果整合,确保飞行的稳定性。
功能定义及性能指标
·主控采用新唐M452,连接 GPS , 2.4G RF , 9 轴传感器 , 压力感应器 , 红外传感器 , 超声波传感器·手把控制采用新唐8051 N79E814控制飞行器飞行姿态
·控制手把与主控端通过SSV 2.4G 射频通信
·电调部分采用MINI54系列
·空旷地带控制距离可达100米
方案优势
①支持高速 ESC(400Hz)②支持低电池侦测
③支持飞行动态 PID 调适
④SSV 2.4G 射频
⑤空旷地带控制距离可达100米
⑥支持传感器校准,陀螺仪增稳
原理及实物图


评论
了解了解
不错,了解一下。