采用8051数字转速表


个三位数的数字转速表接触少用8051微控制器,它可用于测量转/秒的旋转轮,盘,轴或类似的东西被引入本项目。转速表可以测量高达255转/秒,最多在1转/秒的精度。你只需要做的是使传感器的反光条(铝箔纸,白板纸或类似的一些东西)粘在旋转表面和表显示在显示屏上转/秒。下面示出的数字式转速计的电路图。
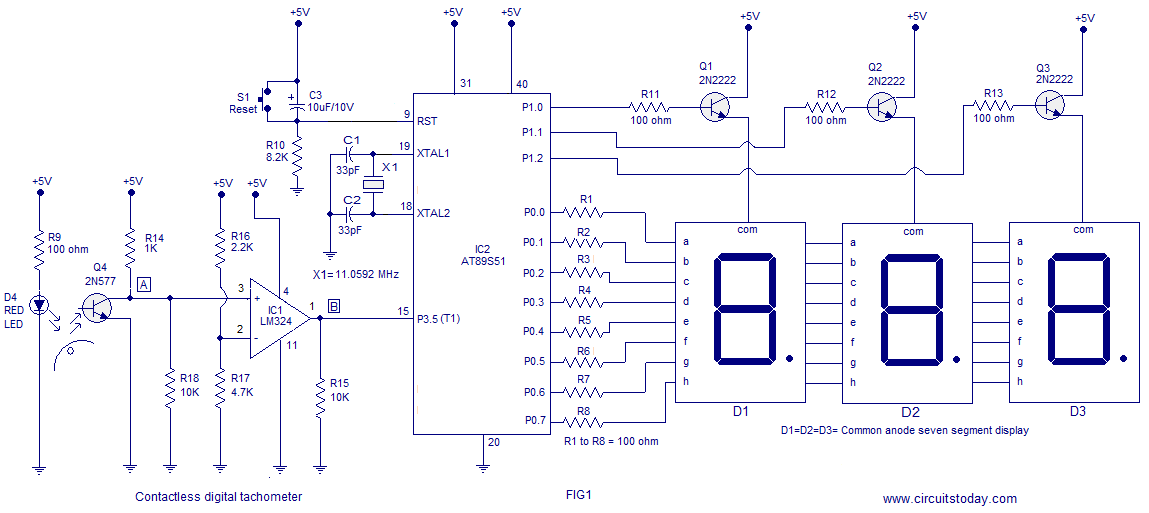
数字转速表采用8051
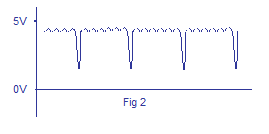
电路的第一部分是基于光电晶体管Q4和红色LED D4的光学拾取器。每次的旋转物体上的反射条纹通过在前面的传感器组件,该反射光落在上的光电晶体管,这使得它进行更多的,作为结果的集电极电压下降趋向于零。通过示波器观察时,集电极波形的光电晶体管Q4(2N5777)看起来像这样:
 接下来的部分是信号调理单元,运算放大器LM324(IC1)的基础上。只有一个运算放大器内的四LM324这里使用的是,它作为一个比较器与参考电压设定为3.5V(使用电阻R16和R17)是有线。此比较器单元的工作是尖尖的集电极波形转换成一个整齐的方形脉冲串,以便它可以被施加到微控制器。每次的光电晶体管的集电极电压低于3.5V时,比较器的输出去负饱和度和每次的光电晶体管的集电极电压高于3.5V时,比较器的输出变为正的饱和导致的波形类似这样的:
接下来的部分是信号调理单元,运算放大器LM324(IC1)的基础上。只有一个运算放大器内的四LM324这里使用的是,它作为一个比较器与参考电压设定为3.5V(使用电阻R16和R17)是有线。此比较器单元的工作是尖尖的集电极波形转换成一个整齐的方形脉冲串,以便它可以被施加到微控制器。每次的光电晶体管的集电极电压低于3.5V时,比较器的输出去负饱和度和每次的光电晶体管的集电极电压高于3.5V时,比较器的输出变为正的饱和导致的波形类似这样的:
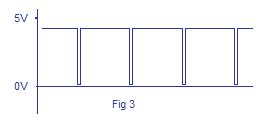
从上述的两个曲线图中,可以看到的波形表示的负向边沿通道的反射贴剂传感器两端的,这意味着一次旋转。如果你能一些如何测量的负边沿发生在一秒钟内,然后转/秒的旋转的对象,这就是微控制器在这里所??做的。
8051微控制器在这里做两件工作,他们分别是:
1)数一数的负脉冲,可在其T1引脚(引脚15)。
2)做必要的数学和显示的3位7段显示器上的计数。
8051(Timer0和Timer1)的定时器计数的目的。定时器1的配置为8位自动重载计数器注册传入的零脉冲的数量和Timer0被配置为一个16位定时器,生成所需的1秒的时间跨度为Timer1的计数。
计划。
ORG 000HMOV DPTR,#LUT / /移动地址LUT DPTRMOV P1,#00000000B / /设置P1作为输出端口MOV P0,#00000000B / /设置为输出端口P0MAIN:MOV R6,#14DSETB P3.5MOV TMOD,#01100001B / /设置定时器1模式2模式定时器,计数器,定时器MOV TL1,#00000000B / /加载初始值TL1MOV TH1,#00000000B / /加载初始值TL1SETB TR1 / /启动定时器(计数器)1返回:MOV TH0,#00000000B / /加载初始值TH0MOV TL0,#00000000B / /加载初始值TH0SETB TR0 / /启动定时器0位置:JNB TF0,在这里/ /检查定时器0卷CLR TR0 / /停止定时器CLR TF0 / /清除定时器标志0DJNZ R6,BACKCLR TR1 / /停止定时器(计数器)1CLR TF0 / /清除定时器标志0CLR TF1 / /清除定时器标志1ACALL DLOOP / /调用子程序DLOOP显示计数SJMP MAIN / /跳回主循环DLOOP:MOV R5,#100DBACK1:MOV A,TL1 / /加载到累加器的当前计数MOV B,#100DDIV AB / /隔离的第一个数字计数SETB P1.0ACALL DISPLAY / /第1位7段模式转换MOV P0,A / /将端口0模式ACALL DELAY / /延时1msACALL DELAYMOV A,BMOV B,#10DDIV AB / /数字的计数隔离secongCLR P1.0SETB P1.1ACALL DISPLAY / /第2位7段模式转换MOV P0,AACALL DELAYACALL DELAYMOV A,B / /将最后一个数字的计数累加器CLR P1.1SETB P1.2ACALL DISPLAY / /转换的第三个数字7段模式MOV P0,AACALL DELAYACALL DELAYCLR P1.2DJNZ R5,BACK1 / /重复的子程序DLOOP 100倍RETDELAY:MOV R7,#250D / / 1毫秒的延迟DEL1:DJNZ R7,DEL1的RET显示:MOVC A,@ A + DPTR / /获取的电流值7段数字驱动模式在ACPL A / /(见注1)RETLUT:DB 3FH / /查找表(LUT)从这里开始DB 06HDB 5BHDB 4FHDB 66HDB 6DHDB 7DHDB 07HDB 7FHDB 6FHEND
注释。
1)LUT用在这里是为了一个共同的阴极七段显示器上(在以前的项目中使用),在这里我们使用的是共阳极显示。指令CPL A将只是补充在累加??器的数字驱动模式,使之成为适合于共阳极显示器。这样做只是因为要节省我的时间,但没有一本教科书的方法。正确的方法是做一个专门的LUT共阳极配置,应尽量避免额外的CPL一个指令。
2)LM324是一款四通道运算放大器和它里面只有一个运算放大器使用。我用LM324,因为这是我当时唯一的单电源运算放大器。您可以使用任意单电源运算放大器相匹配的电源电压(5V)。您甚至可以使用双电源运算放大器(如流行的741)在单电源模式(+ V引脚连接到正电源和-V引脚连接到地面),但我不会推荐它,除非你有一台示波器。像一个专用的单电源运算放大器在相同的情况下,配置的双电源运算放大器在单电源模式下不会给结果。
3)正如我们在前面看到的配置模式1(16位定时器)定时器0产生1秒的时间跨度。所以它最多可以数是2的16次方即65536。8051单片机的晶振频率除以12,然后把它当成一个定时器的时钟使用内部网络。这意味着定时器将递增的晶振频率为每1/12th之一。一个定时器增量所需的时间将是8051系统时钟频率为12MHz的晶体1μS(即1/12MHz)。因此,最大的时间延迟,可以使用一个会话定时器得到,将65536μS被环14倍得到的1秒的延迟。通过这篇文章,延迟使用8051的定时器为更好地把握。
评论