机器人手术系统的电源设计

想像一下,利用微创切口来进行重大外科手术,就能大大减轻疼痛,缩短住院时间,让病人更快恢复日常活动,并可获得更佳的临床效果。但直到最近,可用的外科手术方式还是非常有限的,只能采用大型切口的传统开放式手术或是腹腔镜手术,这也就是一种利用光源导管通过小型切口进行的手术。然而,尽管腹腔镜手术是一种侵入性极低的手术,但由于仪器因素,通常只能用来进行非常简单的步骤。受益于技术的突破,如今出现了另一种利用机器人辅助的微创手术。
这些手术系统结合了电脑和机器人技术,能用来实现机器人辅助腹腔镜、胸腔镜或内视镜手术。通过向外科医生提供这些加强的功能,微创手术将能够以比传统外科方法更佳的视觉化效果、精密度、灵敏度和控制来处理更多的情况。
微创机器人辅助手术的应用广泛,从心脏手术到癌症手术都能适用,可以治疗多种病症,例如前列腺癌、子宫内膜癌、病态型肥胖和二尖瓣回流等。这些系统以创新方式将机器人与外科技术结合在一起,让外科医生能为各种复杂病症的病人提供最有效、侵入性最低的治疗方式。
该设备的典型设置包括手术台以及病人推车,推车上安装了互动式机器人手臂和一台可观看身体内部的高倍数3D影像监视器。造影和影像引导技术可为外科医生提供有关重要身体内部结构和仪器位置的准确三维信息。
进行手术时,外科医生会利用像钳子一样的主控设备来操作。当外科医生操作控制台时,系统会对输入产生实时反应,并将医生的手部、腕部和手指动作转换成微型设备的精密动作。图1所示为机器人手术系统的照片。

图1:典型的机器人辅助手术机器
这类系统通常采用分散式电源架构设计。因此,它是以AC电源线供电,可能是110VAC或220VAC,然后转换到能为48V电池组充电的隔离式48V DC电压。48V总线电压会流过整个系统,以对所有子系统的负载稳压器的下行点供电,包括机器人手臂、系统电子、仪器和高清显示。当AC主电源断电时,电池组可用来维持系统的运行。然而,根据电池充电的状态,电池组电压可能会高于、低于或等于48V输入,因而,要为此应用设计电源已成为一个挑战。幸运的是,凌力尔特公司最近推出LT8705,这是80V同步降压-升压型控制器,可解决这样的电源需求问题。
新的设计方法
LT8705是效率非常高(高达98%)的同步降压-升压型DC/DC控制器,输入电压能够以高于、低于或等于稳压的输出电压运行。该器件有四个可调节输入电流/电压以及输出电流/电压的反馈环路。输出电流环路可为电池充电器提供已调输出电流,或作为电流源。通过使用具备4开关同步整流的单一电感器,LT8705能在2.8V至80V的宽广输入电压范围内运行,并产生一个1.3V至80V的输出。单一器件最高可提供250W的输出功率。若将多个电路并联,还能实现更高的输出功率。
其他的特性还包括:能够显示哪个反馈环路在启用的伺服引脚、为外部器件供电的3.3V/12mA LDO、可调整的软启动、内置的芯片温度监测器,以及-40℃至125℃的工作结温范围。LT8705有38引脚、5mm x 7mm QNF,以及38引线TSSOP两种封装形式。同时,也可提供LT8705的LTspice电路模型,能容易地评估各种创新应用。
LT8705包含四个误差放大器,能用来调节或限制输出电流、输入电流、输入电压和输出电压。在典型的应用中,通常会调节输出电压,其余的误差放大器则是用来监控过高的输入或输出电流,或是输入欠压的情况。在电池充电器等其他应用中,输出电流调节器能促进恒定的电流充电,直到达到预先设定的电压值为止,这时输出电压控制便会接管任务。在图2显示的电路图中,此LT8705电路是用来为一个48V电池充电,并能在从36V至72V之间变化的输入电压范围运行。把多个电路并联在一起,便能用于更高功率的应用。电路中有4个外部MOSFET,能使此电路作为同步降压-升压型转换器,并通过配置成为给4个串联12V铅酸电池充电的电流源。
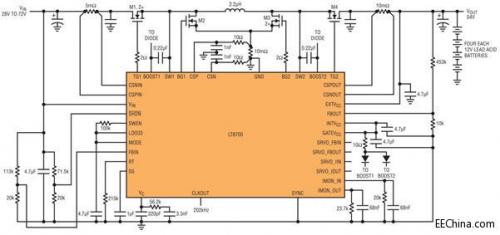
图2:LT8705电池充电器电路图
电源开关控制
图3为简化的示意图,其说明了怎样将4个电源开关连接至电感器、VIN, VOUT和地。
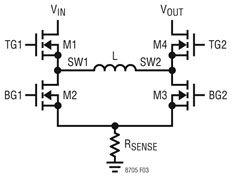
图3:由LT8705驱动4个MOSFET开关的简化示意图
当VININ明显高于VOUT时,该器件将运行在降压模式。在此区域中,M3始终关断而M4始终导通,除非在突发模式(Burst Mode)操作或不连续模式中检测到反向电流。在每个周期的起点,同步开关M2首先接通,而电感器电流由一个内部放大器来检测。一个斜率补偿斜坡信号被加至检测电压,接着与一个基准电压进行比较。在检测到的电感器电流降至基准以下之后,开关M2关断,而M1(同步整流器)则在此周期的剩余时间里接通。开关M1和M2将交替接通和关断,其作用类似于一个典型的同步降压型稳压器。
当VININ和VOUT彼此靠近时,占空比将减小,直至达到转换器在降压模式中的最小占空比为止,该器件随后进入降压-升压区,而且所有4个MOSFET将执行开关操作。
当VOUT明显高于VIN时,该器件将运行在升压模式。在此区域中,M1始终导通,而开关M2则始终关断。在每个周期的起点,开关M3首先接通,而电感器电流由一个内部放大器来检测。在检测到的电感器电流升至高于基准电压之后,开关M3关断,而开关M4则在此周期的剩余时间里接通。开关M3和M4将交替接通和关断,其作用类似于一个典型的同步升压型稳压器。
故障情况

这些手术系统结合了电脑和机器人技术,能用来实现机器人辅助腹腔镜、胸腔镜或内视镜手术。通过向外科医生提供这些加强的功能,微创手术将能够以比传统外科方法更佳的视觉化效果、精密度、灵敏度和控制来处理更多的情况。
微创机器人辅助手术的应用广泛,从心脏手术到癌症手术都能适用,可以治疗多种病症,例如前列腺癌、子宫内膜癌、病态型肥胖和二尖瓣回流等。这些系统以创新方式将机器人与外科技术结合在一起,让外科医生能为各种复杂病症的病人提供最有效、侵入性最低的治疗方式。
该设备的典型设置包括手术台以及病人推车,推车上安装了互动式机器人手臂和一台可观看身体内部的高倍数3D影像监视器。造影和影像引导技术可为外科医生提供有关重要身体内部结构和仪器位置的准确三维信息。
进行手术时,外科医生会利用像钳子一样的主控设备来操作。当外科医生操作控制台时,系统会对输入产生实时反应,并将医生的手部、腕部和手指动作转换成微型设备的精密动作。图1所示为机器人手术系统的照片。
图1:典型的机器人辅助手术机器
这类系统通常采用分散式电源架构设计。因此,它是以AC电源线供电,可能是110VAC或220VAC,然后转换到能为48V电池组充电的隔离式48V DC电压。48V总线电压会流过整个系统,以对所有子系统的负载稳压器的下行点供电,包括机器人手臂、系统电子、仪器和高清显示。当AC主电源断电时,电池组可用来维持系统的运行。然而,根据电池充电的状态,电池组电压可能会高于、低于或等于48V输入,因而,要为此应用设计电源已成为一个挑战。幸运的是,凌力尔特公司最近推出LT8705,这是80V同步降压-升压型控制器,可解决这样的电源需求问题。
新的设计方法
LT8705是效率非常高(高达98%)的同步降压-升压型DC/DC控制器,输入电压能够以高于、低于或等于稳压的输出电压运行。该器件有四个可调节输入电流/电压以及输出电流/电压的反馈环路。输出电流环路可为电池充电器提供已调输出电流,或作为电流源。通过使用具备4开关同步整流的单一电感器,LT8705能在2.8V至80V的宽广输入电压范围内运行,并产生一个1.3V至80V的输出。单一器件最高可提供250W的输出功率。若将多个电路并联,还能实现更高的输出功率。
其他的特性还包括:能够显示哪个反馈环路在启用的伺服引脚、为外部器件供电的3.3V/12mA LDO、可调整的软启动、内置的芯片温度监测器,以及-40℃至125℃的工作结温范围。LT8705有38引脚、5mm x 7mm QNF,以及38引线TSSOP两种封装形式。同时,也可提供LT8705的LTspice电路模型,能容易地评估各种创新应用。
LT8705包含四个误差放大器,能用来调节或限制输出电流、输入电流、输入电压和输出电压。在典型的应用中,通常会调节输出电压,其余的误差放大器则是用来监控过高的输入或输出电流,或是输入欠压的情况。在电池充电器等其他应用中,输出电流调节器能促进恒定的电流充电,直到达到预先设定的电压值为止,这时输出电压控制便会接管任务。在图2显示的电路图中,此LT8705电路是用来为一个48V电池充电,并能在从36V至72V之间变化的输入电压范围运行。把多个电路并联在一起,便能用于更高功率的应用。电路中有4个外部MOSFET,能使此电路作为同步降压-升压型转换器,并通过配置成为给4个串联12V铅酸电池充电的电流源。
图2:LT8705电池充电器电路图
电源开关控制
图3为简化的示意图,其说明了怎样将4个电源开关连接至电感器、VIN, VOUT和地。
图3:由LT8705驱动4个MOSFET开关的简化示意图
当VININ明显高于VOUT时,该器件将运行在降压模式。在此区域中,M3始终关断而M4始终导通,除非在突发模式(Burst Mode)操作或不连续模式中检测到反向电流。在每个周期的起点,同步开关M2首先接通,而电感器电流由一个内部放大器来检测。一个斜率补偿斜坡信号被加至检测电压,接着与一个基准电压进行比较。在检测到的电感器电流降至基准以下之后,开关M2关断,而M1(同步整流器)则在此周期的剩余时间里接通。开关M1和M2将交替接通和关断,其作用类似于一个典型的同步降压型稳压器。
当VININ和VOUT彼此靠近时,占空比将减小,直至达到转换器在降压模式中的最小占空比为止,该器件随后进入降压-升压区,而且所有4个MOSFET将执行开关操作。
当VOUT明显高于VIN时,该器件将运行在升压模式。在此区域中,M1始终导通,而开关M2则始终关断。在每个周期的起点,开关M3首先接通,而电感器电流由一个内部放大器来检测。在检测到的电感器电流升至高于基准电压之后,开关M3关断,而开关M4则在此周期的剩余时间里接通。开关M3和M4将交替接通和关断,其作用类似于一个典型的同步升压型稳压器。
故障情况
在某些工作条件下,LT8705将启动一个故障序列。如果出现任何此类情况(例如:过流或者过压状况),则内部开关操作和时钟输出被停用。与此同时,一个超时序列开始,此时需要重启软起动功能。倘若故障持续存在(比如在过流期间),将不允许软起动功能重新启动转换器。在故障情况已被消除且一个预先规定的超时周期结束之后,转换器将重新启动,而重新启动的速率取决于分配给LT8705之软起动引脚的电容器数值。超时周期可减小器件及其他下游功率组件所承受的电应力和热应力。
总结
机器人手术系统能被用来进行多种重大的微创手术,以帮助病人缩短住院时间,更快恢复正常行动,并取得更佳的临床效果。如果采用分布式电源架构来给这类系统供电,则允许使用一个负责给用于所有子系统的下游负载点稳压器供电的48V标称电池后备总线电压。由于其具备利用一个可以高于、低于或等于输入电压的浮动电压对电池进行高效充电,因此凌力尔特的LT8705同步降压-升压型DC/DC控制器能够显著地简化电源设计。
评论