
血管介入手术器械运动控制系统

医学教育是非常重视实践操作的,没有临床实践就不能培养出合格的医生。现代医学人才培养的瓶颈之一就是学生被迫远离了临床真实环境下的操作练习,特别是血管内介入治疗这种要求高精确度的手术技术。
为了配合用于介入手术培训的血管介入手术模拟教学系统,自主开发了一套血管介入手术器械运动控制系统。该系统能够将介入手术器械导丝的位移信号发送给上位机,准确描述上位机软件系统中虚拟导丝的位移,实现同步运动。同时导丝受力反馈装置的设计能够模拟导丝在血管中运动时遇到的阻力,提供良好的手感,达到真实医学培训目的。
0引言
血管类疾病已经成为严重威胁人类生命的疾病之一。目前放射介入疗法对治疗此类疾病效果明显,针对传统介入手术医生的培训无法经常在临床环境下进行的问题,国内已经出现介入手术模拟教学系统用于手术培训。血管介入治疗模拟教学系统由介入手术器械运动控制系统和虚拟介入手术软件系统组成,本课题主要对前者进行了研究,自主设计开发了一种血管介入手术器械运动控制系统。常见的血管介入手术器械有各种型号的导丝、导管、造影器、气囊、支架等。由于导丝在引导导管进入血管和放置支架、球囊等手术器械中起着非常重要的作用,因此本文中论述的介入手术器械以导丝为例。系统由导丝位移信息采集装置和导丝受力模拟装置两部分组成。
1导丝位移信息采集装置
位移采集装置的作用是在进行介入手术模拟时,能够准确采集训练者对导丝的推拉旋转产生的导丝位移信息,然后单片机读取位移信息处理后发送给上位机软件系统。
1.1采集原理
采用光学传感器可以进行无接触式测量和采集信息,但是普通光学传感器灵敏度较小,对采集物体的表面也有很高的要求,对小型精细物体如导管、导丝等的运动信息采集不够精确,所以经过对比,本文使用激光位移传感器芯片ADNS-7530,进行无接触式测量,测量精度、耐用性、灵活性等方面得到了很大的提高。
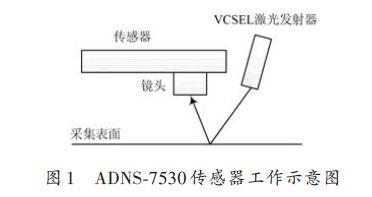
ADNS-7530工作示意图如图1所示。当有物体在镜头采集距离内移动时,激光发射器VCSEL向物体表面发射激光,经反射后由传感器接收,通过光学原理获取连续物体表面图像,然后根据前后两张图像变化信息,自动计算出物体表面移动的方向和增量并存储在内部寄存器里。
1.2采集装置
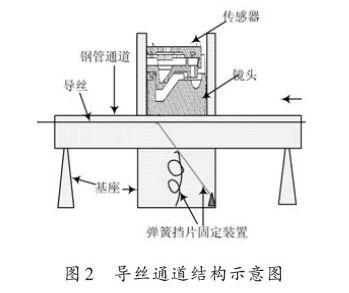
本文设计的导丝通道装置主要由钢管通道、传感器电路板、基座、弹簧挡片固定装置等组成。如图2所示。
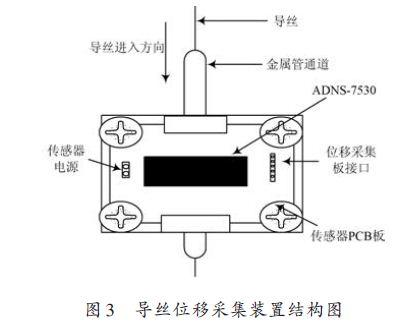
导丝位移信息采集装置如图3所示。ADNS-7530焊接在采集电路板上,电路板固定在基座上,带有凹槽的金属通道在电路板下穿过,电路板上有采集接口和电源接口分别与外部单片机引脚和供电电源连接。
1.3采集电路设计
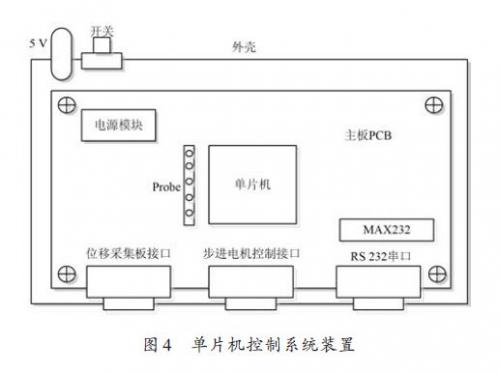
位移信息采集装置中,采集电路主要是ADNS-7530与单片机之间的通信电路,包括单片机对传感器内的寄存器进行初始化操作,以及读取传感器采集到的导丝实时的位移信息;再就是单片机与上位机软件系统的串口通信电路,单片机将位移信息处理打包后通过串口发送给上位机。ADNS-7530传感器采集位移信息时,将位移信息以二进制形式存储在了内部寄存器Delta_X_L、Delta_Y_L、Delta_XY_H中,单片机通过SPI方式读取上述寄存器中的位移数据。ADNS-7530要正常工作,准确采集导丝的位移信息,必须先对其内部的寄存器按照一定的顺序进行配置。如图4所示。
2导丝受力模拟装置
导丝在血管中移动与血管壁发生碰撞时,前进会受到阻力,因此,想要更加逼真地模拟血管内介入治疗的过程就要增加力反馈,本文自主设计了一个导丝受力模拟装置。该装置的作用是将上位机虚拟手术软件系统中,导丝模型与血管模型发生碰撞后对导丝模型所产生的阻力施加于真实的导丝,模拟真实的手术环境。使训练者感受到反馈力后,及时调整操作动作,从而达到训练的目的。由于导丝在血管中运动只存在单一方向的移动和转动,具有两个自由度。用一个二维的受力反馈装置即可满足要求。为了安装和使用方便,将位移信息采集装置和受力模拟装置一起封装在一个大的塑料盒中,只将金属管通道和一些接口留出,与单片机控制系统装置连接和通信。本文设计的导丝受力模拟装置如图5所示。
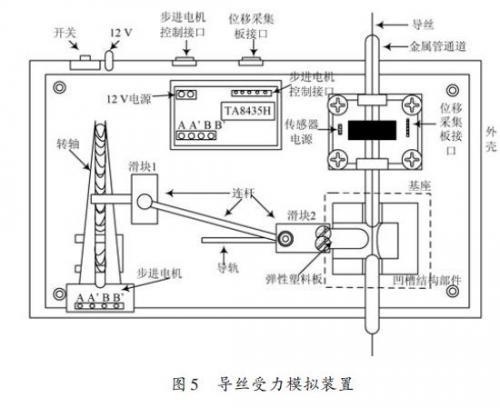
在本装置的设计中传动装置包括转轴、连杆、滑块1和滑块2以及导轨。
滑块1套在转轴上,连杆通过两个螺母将滑块1和滑块2连接起来,滑块1的运动通过连杆带动嵌在导轨上的滑块2左右运动。力反馈装置执行过程是这样的,通过步进电机转动,带动转轴转动,从而使转轴上的滑块1向外和向内运动。步进电机正转,滑块1向内运动,带动连杆使其推动滑块2在导轨上向右运动,镶嵌在滑块2上的弹性塑料板向右挤压穿过凹槽结构的导丝,导丝受到压力后运动会受到影响,表现在用手推导丝时有一种阻力感,不同的压力阻力感不同,从而使操作者改变对导丝的操作。步进电机反转则过程相反。
3系统测试
上位机虚拟手术软件系统主要包括根据真实数据进行血管分割、血管建模、导管和导丝建模、支架和气囊建模、碰撞检测等。本系统与上位机虚拟介入手术软件系统连接后进行测试,测试结果如图6和图7所示。
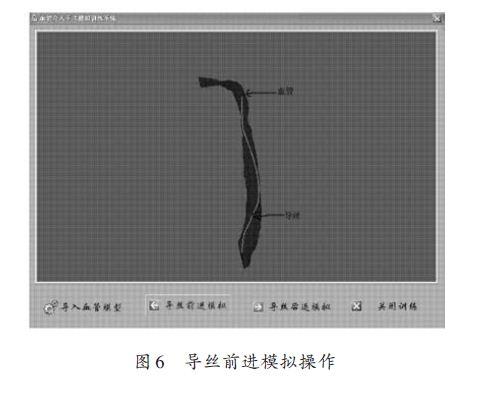
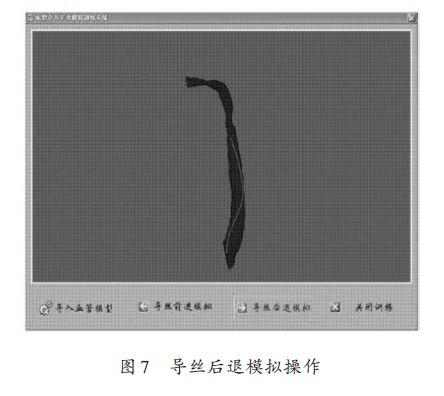
训练者在操作金属管通道里真实的导丝运动时,上位机软件系统中的虚拟导丝能够在虚拟血管里同步运动,发生碰撞后能将碰撞信号发送给单片机处理,给导丝施加对应的压力,从而模拟真实的导丝在血管中运动所受到的阻力。
系统运行效果基本满意,能够基本满足训练者的练习。当然系统还存在许多需要改进的地方,如增加多个位移采集装置、更加灵敏的受力反馈装置的设计、更加优美的上位机软件界面设计等,以更好的满足当代医学模拟教学的需求。
4结语
本文所阐述的血管介入手术器械运动控制系统,为介入手术医生的培训提供了很大的帮助。该系统具有一定程度的通用性,以后在对血管介入手术模拟教学系统进行研究时,可以在本系统的基础上进行进一步的开发,增加和扩展功能,降低研发成本,缩短开发周期。

评论