基于PSoC的太阳自动跟踪器,可应用在太阳能灶及热水器上


摘要
太阳能系统效率的高低在很大程度上取决于装置与太阳照射光线的对准程度。而太阳自动跟踪装置可有效提高太阳能系统的效率,从而降低光伏系统的成本。本文基于此原理,利用PSoC芯片设计了一款太阳自动跟踪与控制系统,通过PSoC对步进电机的精确控制,可使光伏系统自动跟踪太阳。本转置采用双轴结构,可在水平和竖直方向上自动跟踪太阳。本系统运行稳定可靠、跟踪误差小、成本低廉,可广泛应用于太阳能电池板、太阳能热水器等太阳能设备上。
1 引言
太阳能作为一种清洁无污染的可再生能源,越来越广泛的应用在我们日常生活中。近年来如何提高太阳能系统的利用效率正受到越来越多的关注。而太阳能系统效率的高低在很大程度上取决于装置与太阳照射光线的对准程度。太阳能自动跟踪转置控制光伏系统以自动对准太阳,可有效提高太阳能系统的效率,从而降低光伏系统的成本。
本文设计了一种基于PSoC芯片的太阳自动跟踪与控制系统,通过PSoC对电机的精确控制,可使光伏系统自动跟踪太阳。本转置将采用双轴结构,可自动检测太阳的高度角和方位角,并控制步进电机带动光伏系统跟踪太阳。
2 控制基本原理
目前较流行的太阳能跟踪器主要有时钟式和比较控制式两类[1-3],时钟控制式其控制方法是定时法:根据太阳在天空中每分钟的运动角度,计算出太阳光接收器每分钟应转动的角度,从而确定出电动机的转速,使得太阳光接收器根据太阳的位置而相应变东。该方法虽然电路简单,但由于时钟累计误差不断增多,系统的跟踪精度很低。
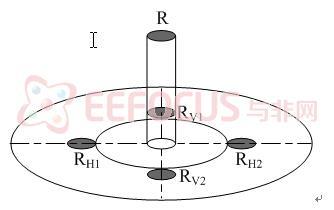
图 1 传感器结构示意图
本方案我们采用比较控制的方法来控制光伏阵列跟踪太阳。利用光敏电阻在光照时阻值的变化制作成可以检测太阳位置的传感器,结构如图1所示,利用光敏电阻在光照时阻值发生变化的原理,将五只光敏电阻呈十字形排列。R固定在聚光板的指日棒上,RV1、RV2、RH1、RH2对称分布在指日棒两侧。RV1、RV2探测太阳高度角的变化,RH1、RH2探测太阳方位角的变化,太阳光线与太阳能集能器的平面法线不平行时,传感器就能检测出偏差信号。R探测太阳辐照度的变化,当太阳的辐照度低于或高于工作照度时就输出启动或复位信号。

图 2 系统控制阵列随光转动基本原理框图
系统控制阵列随光转动原理框图如图2所示,当太阳光线发生倾斜时,两对光敏电阻检测到阳光的倾斜信号,该信号经放大滤波后由控制单元开始计算并确定整个装置需要转动的方向及大小,发出调整信号进而控制并驱动步进电机转动,调整光伏阵列直到光伏阵列对准太阳。
3整体设计方案
3.1 系统结构
整个系统由光照度传感器以及故障检测传感器部分(传感器单元)、控制单元、驱动执行机构三部分组成。系统完整框图如图3所示,传感器单元主要由光敏电阻及用于故障检测的风大、雨水、振动等传感器及其外围电路组成,主要实现将光照度、风力变换以雨水检测等信号转化为相应的信号供PSoC芯片进行处理;PSoC芯片作为控制核心主要实现对传感器部分中光敏电阻传送过来的信号进行分析处理、进而控制整个设备的转动、以及电机驱动三大功能,同时,该控制核心还将传感器单元传送的故障检测信号进行分析并启动相应的保护程序以保护整个设备的安全;驱动执行单元由步进电机和简单机械结构组成,用来实现电机驱动与旋转,并通过机械传动机构带动光伏电池阵列转动。
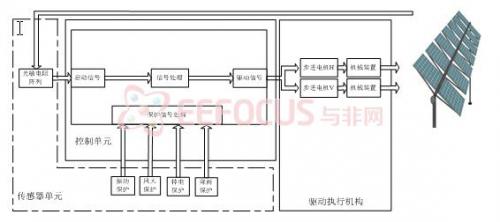
图 3 基于PSoC的太阳自动跟踪系统框图
传感器检测天亮和天黑、以及是否有云等信息,控制部分决定是否产生开关信号以启动系统跟踪检测功能,在整个设备启动后,控制部分经过计算确定整个设备应转动的方向和大小,进而发出指令控制驱动执行机构带动光伏阵列转动。同时,在设备转动到预定的位置后,控制部分还将检测此刻光伏阵列是否垂直于太阳光的照射,以确定光伏阵列是否跟踪上太阳的位置。而保护信号是保证系统在外界以及其他非人为因素情况下所执行的一种操作指令,以确保系统不受损坏,从而提高整个系统的可靠性。
3.2 硬件部分实现
控制部分选用Cypress公司生产的PSoC芯片,PSoC可配置片上系统是该公司在2001年底推出的具有全新理念的可编程微控制器。与传统的微控制器不同,PSoC 因可动态编程配置而具备传统微控制器所欠缺的高度灵活性和应用广泛性。因此,PSoC能够适应非常复杂的实时控制需求,使用它进行产品开发可以大大提高开发效率,降低系统开发的复杂性和费用,同时增强系统的可靠性和抗干扰能力,它适用于各种控制和自动化领域
3.2.1 信号处理部分:
该部分主要用于处理由外部的传感器包括光敏电阻、风大传感器、雨水传感器以及掉电传感器等传过来的信号用以后级的程序判定。各个传感器传过来的信号处理如下图所示:
(1)光敏电阻信号部分:
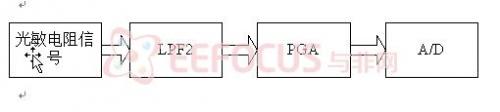
图 4 光敏电阻信号处理
经由A/D转换后的数字信号用于后级计算转动方向及角度,并作为电机转动大小及方向的基准。
(2)风大传感器,雨水传感器等产生的信号经由继电器后连接到PSoC芯片的管脚,当相应管脚检测到高电平时,则启动相应的保护程序,将设备转动到相应的安全位置。
(3)掉电保护,原理同(2),不同的是当相应管脚检测到高电平时,系统发出报警信号。
-
控制部分:
控制部分主要包括可视化界面以及电机在收到命令之后如何转动的程序部分。
(1)可视化界面部分:
该部分主要由Visual C++实现,主要负责长期监控整个转动装置的转动是否正常,PC是否接收到了PSoC芯片传输过来的故障信号,并进行分析是哪种故障,以可视化的形式供给用户进行分析。
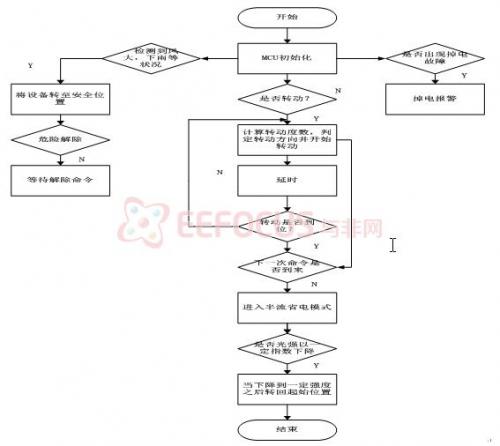
图 5 系统流程图
(2)电机转动部分以及故障信号检测部分:
该部分主要由前级的光敏电阻信号触发,在收到触发信号之后,PSoC芯片将启用储存在其内部的转动程序进行分析,从而转动到相应的位置。同时,PSoC芯片还将不停的检测故障信号,在收到故障信号之后执行相应的命令。
该部分功能主要由软件实现。流程图如图5所示。
3.2.3电机驱动部分:
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的。本系统采用步进电机控制太阳能器件转动以朝向太阳,具有控制简单、精度高的优点。
电机驱动利用PSoC输出,其硬件结构如下图所示:
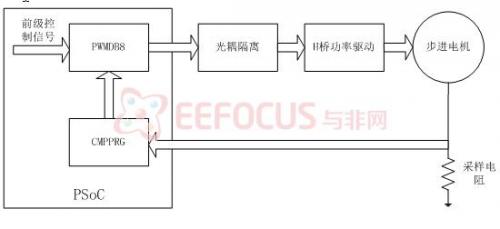
图 6 步进电机驱动结构示意图
本步进电机驱动部分采取的是以PSoC为核心处理器的斩波恒流模式,斩波恒流驱动控制技术是目前步进电机控制的主流技术之一,斩波电路的出现是为了弥补高低压驱动电路波形呈凹形的缺陷,使电机的输出转矩的平均值基本恒定。同时电机的高频响应得以提高,共振现象减弱。斩波驱动中,虽然电路较复杂,但是由于驱动电压较高,电机绕组回路又没有串入电阻,整个系统功耗下降很多,所以电流上升快。当达到所需要的电流时,由于取样电阻的反馈作用,使绕组电流基本恒定,从而保证在很大的频率范围内电动机的输出转矩基本恒定。而输出转矩是步进电机的一个重要性能指标,当我们使电机的绕组电流恒定在一个较高的数值时,就可提升电机的输出转矩。
4 机械驱动部分
综合考虑成本,控制精度及制造难易程度,跟踪器设计成立柱转动式。其结构如图7所示,大齿轮连接于主轴,转动架及支架安装在主轴上,主轴相对于支撑架可以转动,小齿轮与大齿轮啮合,小齿轮连接在马达的输出轴上,马达1固定在底座上。利用小齿轮副动,带动大齿轮转动,实现对太阳方位角的跟踪。支架安装在转动架,马达2安装在支架上,马达2的输出轴连接在接收器上,控制接收器跟踪太阳的高度角。

图 7 机械驱动示意图
5 总结
本文基于PSoC为控制核心,设计了一种自动跟踪太阳高度角与方位角转动的自动太阳跟踪系统,通过PSoC对步进电机的精确控制,可使光伏系统自动跟踪太阳。该系统跟踪准确、成本低、可靠性高、系统性能稳定,且具有多重保护功能,可广泛应用于太阳能灶、太阳能热水器,太阳能光伏阵列等各种太阳能集能装置上,对于大型的光伏发电系统也具有一定的指导意义。
评论