
畜牧养殖智能消毒机器人控制系统电路模块设计

畜牧养殖智能消毒机器人控制系统由机器人智能控制模块、监视模块、及无线网络通讯模块等三大部分组成。工作过程是通过接入互联网的手机或者微型计算机客户端通过无线网络向远程的机器人发送控制指令代码,期间传输信号由发送端使用加密狗加密。当信号经互联网发送到接收终端时,智能消毒机器人网络模块把接收的指令传送到处理器,处理器指示驱动模块驱动智能消毒机器人执行动作。
MAX232转换电平
由于编程及调试控制器电脑与处理器间的电平定义不同,采用MAX232进行电平的转换,其外围电路主要有电源供电部分。
MAX232电平转换模块用来把电脑端的RS232信号处理得到TTL电平,实现电脑和处理器及GPRS模块之间的通信电路如图2所示。

GPRS外围网络模块
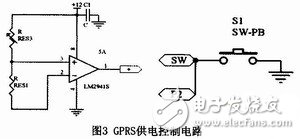
GPRS模块第15管脚必须持续3s的低电平才能实现模块的启动。本文采用的是软件模拟低电平GPRS模块启动。关机电路同样是管脚持续低电平3s,电路如图3所示。
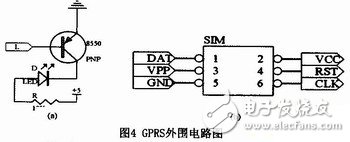
GPRS模块第35脚是一个工作状态指示灯接口,状态表示分别为:亮1s灭1s为启动搜索信号;亮1s灭2s为信号正常;持续点亮为有数据输入或者输出。其工作原理图如图4(a)所示。图4(b)为GPRS模块SIM卡连接示意图。
GPRS 模块串口工作方式的电平为TTL电平,所以GPRS模块和控制核心处理器的连接可以是直接连接。但考虑到模块的调试及程序的烧录,所以在GPRS模块与处理器连接处使用转接开关。以此完成电脑到处理器的通信、GPRS模块到电脑的通信。

评论