常见测量定时精度方法介绍


引言
本应用指南概述了常见的测量定时精度方法,并为Si501/2/3/4 CMEMS系列提供了具体的测量和计算数字,以确定哪些数字系统可使用Si501/2/3/4作为其定时参考,包括考虑其可靠性、稳定性和长期性能。本应用指南可作为Si501/2/3/4应用于许多数据通信系统、数据处理系统以及较低性能数据转换系统的时钟选择参考。
振荡器用于向数字系统提供定时参考。一个完善的定时参考会产生由周期隔开的上升沿的重复序列T,且每个周期准确为T。然而,在现实世界中,由于噪音,在振荡期间,所有定时参考均有一些偏差或错误。在各个数字系统中,可以接受一定量的定时误差,且不会引起数字系统的性能产生任何显著退化。本应用说明了Si501/2/3/4作为许多数据通信系统(包括10/100Mbps以太网系统)可接受定时误差的量和类型。
1、定时误差类型
定时不准的四项主要测量为:
1)频率精度,单位为百万分之(ppm),以许多(>1百万)连续周期的平均周期的倒数为测量。
2)相位抖动,或为边沿不确定,以秒为单位,在频带之上的频域中测量,通过从起始频率到终点频率
(例如,12kHz到20MHz)测量定时误差,从基波频率中偏移,且由两者组成:
a、统计学随机抖动,采用均方根值(rms)量
b、统计学确定性抖动,采用峰峰值(ptp)量
3)周期抖动,或变化,以秒为单位测量,在下列之间:
a、邻边,N=1,作为K测量的统计(rms)或最大(ptp)(这是周期抖动的默认值)
b、间隔N周期的两条边沿,作为K测量的最大(ptp)(或称长期抖动(LTJ)或N相邻周期抖动)
4)相邻周期抖动,以秒为单位测量,作为相邻周期的差值,既有最大正值,又有最大负值。
2、数字功能的类型
数字功能具有三种基本类型。每一类型都对不同类型的定时误差敏感度,因此要求不同的定时规格,以确保其功和能性:
1)要求符合数据吞吐率设置和保持定时限制的数据处理电路,将指定参考时钟频率精度以及周期抖动(N=1)或相邻周期抖动。
2)要求符合发射与接收眼图限制的数据通信电路,将指定参考时钟频率精度以及相位抖动或周期抖动(N>1)为特定数据流长度(N=数据位)。
3)要求符合信号噪声(SNR)或音频/视频清晰度限制的数据转换电路,将指定参考时钟频率精度以及相位抖动或周期抖动(N>1)。
上面所列的每个数据系统功能均要求一定级别的频率精度。该限制通常是系统工程师所熟知的,且可以很容易地与规定的Si501/2/3/4频率精度限制相比较。Si501/2/3/4有两个精度版本,分别为+-50ppm和+-20ppm。该级别的精度符合所以数字系统的要求,除了目前服务于TCXO、VCXO或OCXO的组件外。
3、数字处理应用
数据处理应用必须确保微控制器或微处理器的指令在各个时钟边沿均能完成。在许多先进的处理器中,参考时钟倍增到一个较高的内部频率。内部时钟周期的变化包括PLL电压噪声、内部时钟信号上的耦合噪声和参考时钟噪声。许多系统中,1%的内部时钟周期分频给了参考时钟抖动,所以对于100MHz内部参考时钟,运行抖动<100ps。这意味着参考时钟ptp周期抖动必须小于100ps,这样Si501/2/3/4很容易既符合TYP又符合MAX数据表的ptp周期抖动规格。
4、数据通信应用
数据通信应用必须使用眼图模板进行传送和接收,如图1所示,同时满足数据传送中一定的误码率(BER)。眼图边沿不确定(或接近)的结果来自参考时钟抖动外加许多其他因素,比如耦合系统噪音,数据相关抖动以及传送器抖动。
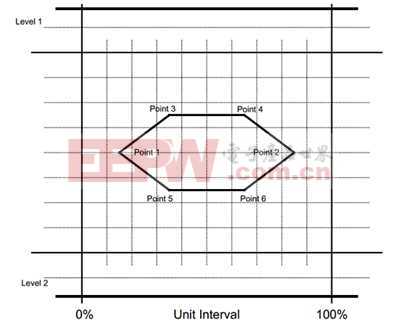
图1 数据传输眼图
各个数字通信系统都有一条相关综合带,在此,参考时钟抖动很重要。该综合带由传送器以及接收器PLL环路带宽(BW)确定。传送器和接收器PLLS在其带宽(BW)范围内追踪参考时钟抖动,并衰减高于其带宽(BW)的,因此,唯一相关的参考时钟抖动是未过滤的,从而接收器无法追踪。
组合的PLLS创建了带通滤波器,其适合于参考时钟相位抖动。该带通滤波器称为数字系统综合带。该频带开始于上限频率(起始频率),且受下限频率(终点频率)限制。因此,各个数字通信系统的参考时钟相位抖动必须经相关综合带过滤。
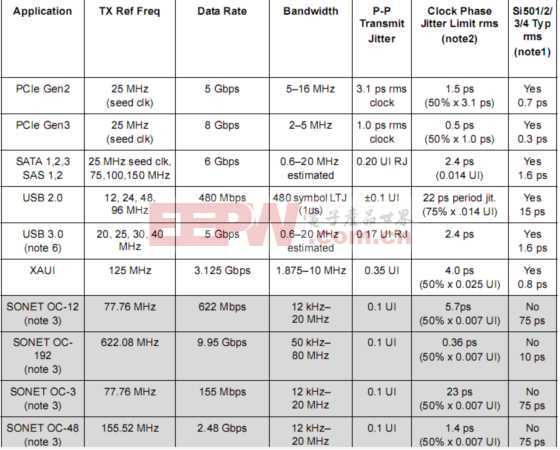
在大多数数据通信标准中,10%到35%单位间隔(UI)的任意地方分配了传送抖动(UI=1个传送周期,它是原始数据率的倒数)。基于各种系统参数,如果已知确定性抖动和接受的BER,通常抖动规定为从起始频率到终点频率的最大(ptp)相位抖动,其可转换成rms抖动。数据通信标准和Si501/2/3/4性能列在表1内。
5、数据转换应用
数据转换应用必须确保模拟-数字(A/D)或数字-模拟(D/A)转换器的SNR不受参考时钟抖动的影响。这意味着,参考时钟所产生的采样噪声不应高于正常量化噪声的一半。
数据转换器的满量程量化噪声已知为SNR dB = 6.02 ENOB +1.76,这里ENOB是有效数位。由于采样抖动,SNR为SNR dB=20log(1/2*pi*Fmax*tjit_rms)),这里tjit_rms为总rms抖动,且Fmax为最高A/D输入或D/A输出频率。注意,Fmax频率越快,则相同采样抖动产生的误差就越多。还有注意的是Fmax频率并不是总是与参考频率相同。
等同这些并求解tjit_rms,规定tjit_rms=1/(7.69*Fmax*2^ENOB)。
例如,某一系统ENOB=8位,且Fmax=10MHz,要求tjit_rms<51ps,我们将除以二得到差数。25.5ps将为由编码器带宽所感兴趣的最低频率集成的最大参考时钟相位抖动。如果感兴趣的最低频率为10kHz,且编码器的带宽为20MHz(2*Fmax),那么集成带将在10KHz和20MHz之间。因为Si501/2/3/4中使用的第一代电路具有较高的“近端”相位噪声(<100KHz),它不适合用于这些类型的高分辨率数据转换应用。在该例中,从10kHz到20MHz集成的Si501/2/3/4相位噪音超过25.5ps。同样的,对于20Hz到20kHz频带,Si501/2/3/4抖动允许14位的ENOB,这低于CD品质音频(ENOB=16),并远低于HiDef音频(ENOB=24)。分辨率较低的应用或者Fmax,例如,Fmax=10MHz的6位,或者Fmax=2.5MHz的8位,就应该可以。
6、总结
总之,对于许多类型的应用和标准来说,Si501/2/3/4具有很好的抖动特性。其频率精度、周期抖动和相邻周期抖动是业界领先的振荡器、且其集成相位抖动对于许多目标数字通信应用都是可以接受的。数据通信应用列表见表1。
表1 Si501/2/3/4数据通信的性能和应用标准

评论