
生物电阻抗测量系统中弱信号检测技术研究--正交双激励信号检测方法(二)

3.3正交双激励数字相敏检波方法
3.3.1正交双激励数字相敏检波原理
数字相敏检波技术能够有效提取被测信号的幅度和相位,随着累积周期的增加,系统的整体误差将减小。但是随着周期的增加,检波的时间也跟着会增加,以这种方式检波时,将系统整体误差减小是以时间为代价换来的。为解决单激励DPSD存在较大系统误差的缺点,本文提出一种正交双激励数字相敏检波方法(D-DPSD),其测量原理如图3.6所示。
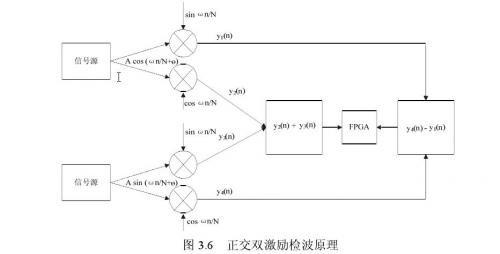
正交双激励数字相敏检波方法充分利用激励源发出的信号的特征,在两路信号进入被测网络前确保其正交,即让余弦激励信号 通过待测网络,与一组同频率正交信号相乘得到y1(n)和y2( n ),然后让同频正弦激励信号通过待测网络,得到y3( n )和y4( n ),将得到的信号经过线性运算即可消除高频分量。
通过待测网络,与一组同频率正交信号相乘得到y1(n)和y2( n ),然后让同频正弦激励信号通过待测网络,得到y3( n )和y4( n ),将得到的信号经过线性运算即可消除高频分量。
3.3.2正交双激励数字相敏检波理论分析
正交双激励数字相敏检波方法是在DPSD算法基础上提出的,在理论上还延续着DPSD的部分核心思想。例如,D-DPSD还是采用数字正弦波或余弦波进入被测网络,每路信号通过被测网络之后还是采用与正交同频信号相乘的方式解调。不同的是,D-DPSD检测方式的用两路保持正交的信号进入被测网络。首先让余弦激励信号通过待测网络,与一组同频率正交信号相乘得到y1(n)和y2( n ),然后让同频正弦激励信号通过待测网络,得到y3( n )和y4( n ),如下所示:


再由(3.15)、(3.16)得到的A sinθ和A cosθ进行以下运算,即可求得目标值θ*和A*:
3.4 DPSD与D-DPSD仿真分析
3.4.1仿真实验为验证数字正交鉴幅鉴相结果,在System Generator上搭建了模型系统进行仿真实验。
System Generator是Xilinx公司的系统级建模工具,在很多方面扩展了MathWorks公司的similink平台,提供了适合硬件设计的是数字信号处理(DSP)建模环境,加速了、简化了FPGA的DSP系统级硬件设计,所搭建的系统可直接生产比特流在FPGA中运行。System Generator提供了系统级设计能力,允许在相同的环境内进行软硬件协同仿真、执行和验证,并不需要书写VHDL代码。在System Generator设计中,利用其强大的信号处理能力,调用各个功能模块,实现单激励数字相敏检波和正交双激励数字相敏检波方法的仿真,其中AD采样数据经挂接在PLB总线上的IP Core进行处理后传给System Generator处理单元,数据进入处理单元后首先进行数据类变换,然后分别送入乘法器进行正交相乘运算,将运算结果送到上位机进行处理。
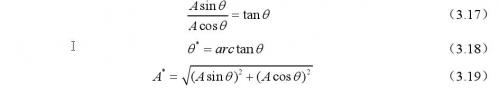
针对本文单激励数字相敏算法,搭建的仿真系统图如图3.7所示。
其仿真结果可以在Wavescope中显示,也可以通过软件从文件中调出加以检测。本文通过MATLAB中的Editor工具调用System Generator中所产生的两个文件:cos.mat和sin.mat.
同样,按正交双激励数字相敏检波方法搭建D-DPSD仿真系统,系统图如图3.8所示。
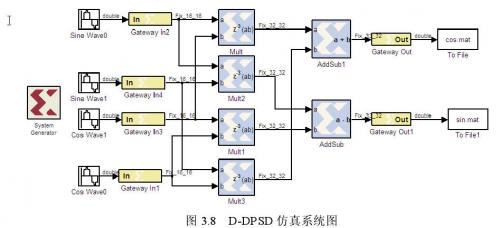
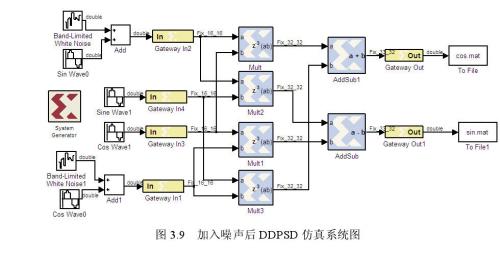
图3.8为纯净情况下的仿真系统图,现实情况中,当激励信号输入系统时,往往伴有噪声输入。搭建仿真系统时,加入白噪声和随机噪声进行仿真,如图3.9所示。将噪声加入正、余弦激励信号Wave0并与Wave0一起输入系统,与其同频的一组正交信号Wave1相乘,将最后所得结果存入cos.mat文件和sin.mat文件中,然后再用MATLAB中的Editor工具调用这两个文件显示仿真结果。
3.4.2 DPSD与D-DPSD仿真对比
将上一节中搭建的三个系统的输出结构通过Gateway Out输出到cos.mat文件和sin.mat文件中,然后再用MATLAB中的Editor工具调用这两个文件,对其幅度相位进行处理后显示仿真结果,将其结果显示为相应的三角函数值。
要提取信号的幅度和相位值,最有效的方法是先提取信号的正弦和余弦值,如果这两个值在一定数值上平稳,则代表这种方法鉴别信号幅度相位是有效的,越平稳,性能就越高。
3.4.2.1 DPSD仿真分析
利用图3.7所示的仿真系统进行仿真,将参数设定为:输入信号一个周期的量化点数为10,输入信号的相位偏移分别为0°和45°。可得到结果如图3.10所示的仿真结果图。
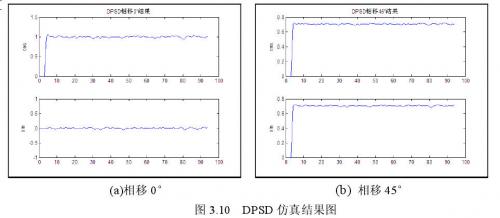
仿真结果图中,横坐标为累加的点数,纵坐标为相应的三角函数值。由图3.10的仿真结果表明,信号通过网络后,被提出来的正余弦值与设定相位的正余弦值基本一致,因此这种方法是可行的。
3.4.2.2 D-DPSD仿真分析利
用图3.8所示的仿真系统进行D-DPSD方法仿真。将参数设定为:输入信号一个周期的量化点数为10,输入信号的相位偏移分别为0°和45°。可得到如图3.11所示的仿真结果图。
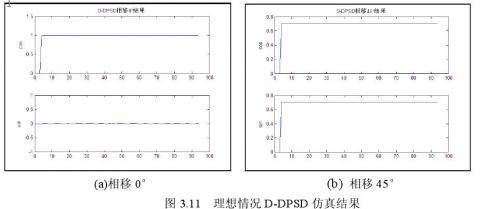
仿真结果表明,信号通过网络后,被提出来的正余弦值与设定相位的正余弦值一致,因此这种方法可以更精确的计算出信号的幅度和相位。
现实情况中,当激励信号输入系统时,往往伴有随机噪声和白噪声输入。运行图3.9所搭建的仿真系统,得到加噪情况下的仿真结果如图3.12所示。

仿真结果表明,信号通过网络后,被提出来的正余弦值与设定相位的正余弦值基本一致,信号平稳,因此这种方法可以得到信号的幅度和相位。
3.4.2.3 D-DPSD与DPSD仿真分析
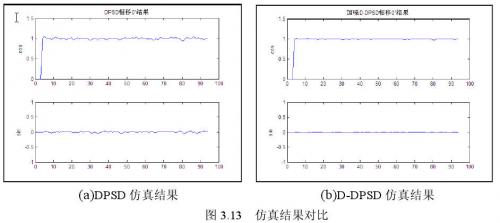
对比D-DPSD算法在DPSD算法基础上提出,将D-DPSD仿真结果与DPSD在相同条件下的仿真结果进行对比,如图3.13所示。由图可知,D-DPSD算法仿真结果明显平稳,误差浮动范围有所减小。因此,D-DPSD减小了DPSD算法累积产生的误差,从而使整个系统的误差得到减小,提高了系统测量信号幅度和相位的精度。
分析测量过程,测量精度主要受AD采样、乘法器截断误差以及累加器截断误差影响。只要设计采用12位以上AD进行采样,并保证差分输入峰峰值为±1.024V.可计算其量化误差为:

量化范围为-V到+V,L为量化间隔数。
为提高测量精度,乘法器和累加器分别采用采用24位和40位,消除截断误差的影响,这样累加器输出的结果理论误差为0.0005V,只要保证AD输入信号幅度较大,系统误差可以远小于5%,可满足生物电阻抗测量要求。
评论