基于AT89C52单片机的智能环保小车电路模块设计


随着电子产品的快速发展,“智能工具”越来越普及化。智能清洁工具也为人们的生活带来了很大的便利。传统的清洁工具功能相对比较单一,只能吸尘,或只能拖地,且基本是手动的,使用起来比较费力。本文设计的多功能智能环保小车可分为以下几个部分:无线遥感模块、避障模块、寻光模块、红外对射模块、稳压模块、降压模块、电机驱动模块。它可实现洒水、拖地、风干、自动避障等多种功能,并且比较节能。
电机驱动模块
采用步进电机控制悬挂物体的准确运动,步进电机不需要使用传感器就能精确定位,但其驱动能有限,故不适合驱动小车。因此,可采用低内阻大电流的四直流电机,其速度相应较好,可以为小车的行走及其他功能更好地提供动力。利用四直流电机模块驱动小车可以实现对小车转向、直行和倒车的控制。图2 所示为四直流电机驱动模块原理图。
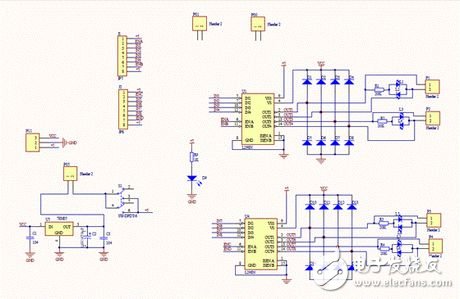
图2 四直流电机驱动原理图
避障模块电路设计
小车车头处装有三个红外传感器,小车在行进时红外传感器发射出红外线,红外线遇到前方的障碍物时会发生漫反射,反射信号被红外传感器接收到以后再传递给单片机,从而通过单片机控制小车做出相应的反应。三只红外传感器分别置于小车前端,不仅方向与小车的前进方向平行,而且对小车与障碍物的相对距离和方位能作出较为准确的判断。图3所示为红外避障模块的原理图。
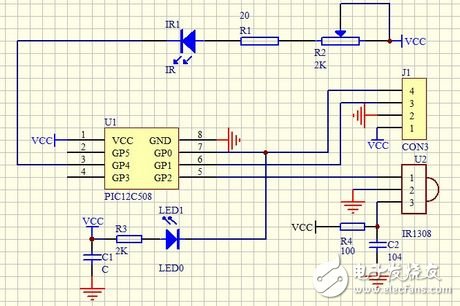
图3 红外避障模块原理图
红外对射模块
本红外对射模块主要由电压比较器LM393和对射式红外头组成,工作电压为5V。该模块用于检测升降装置的状态[4]。该模块对装置的灵活度要求较低,用于本智能小车更有利于程序控制[5-6]。图4所示为红外对射模块原理图。
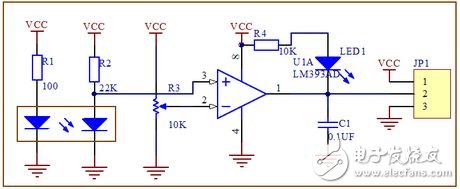
图4 红外对射模块
本设计采用AT89C52单片机作为控制核心系统,设计了一种避障、洒水、拖地、风干为一体的智能环保清洁小车。小车包含了清洁地面系统、供水系统和升降装置等,小车中的水泵实现了洒水功能,车底安装了升降海绵,车尾安装了鼓风机以实现拖地风干功能。小车可在遥控模式、自动模式、自动寻光充电三种模式下工作,实现了多功能控制,并给出了硬件电路设计流程。经过实际测试,能够实现所有功能,且性能稳定。小车可以在遥控、自动、自动寻光充电三种模式下工作,从而体现了它的智能化。与传统清洁小车相比,其功能更完善,且使用起来更方便。经过实际测试,小车实现了所有预期的功能,且能达到预定目标。
评论