
机器人技术电路设计图集锦 —电路图天天读(51)

TOP1 危险品处理机器人控制电路设计
本文首先简要介绍了危险品危险品处理机器人的作用,机械手的结构形式,着重从控制系统与硬件设计介绍了危险品处理机器人机械手控制系统的设计与实现。最后给出了测得的机械手的各项技术指标。危险品处理机器人是用于危险弹药夹持、拔出、搬运和放置作业,并可携带和放置的装置。该项目的完成将解决长期困扰我军的事故炮弹、战争遗留弹等危险弹药安全处理问题。机械手是危险品处理机器人操作过程中直接与弹药接触的重要部件,主要用于执行对危险弹药的夹持、拆除、搬运和放置作业, 机械手工作的稳定性直接决定着弹药处理的成功率,因此机械手的设计至关重要。
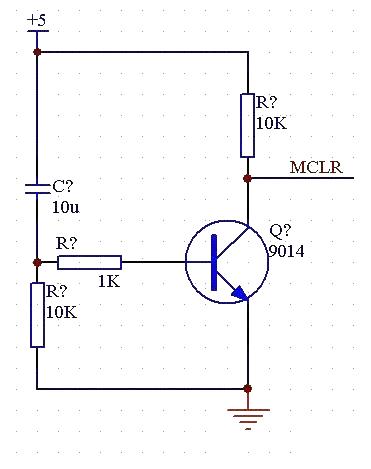
PWM 管脚:DSP 的每个事件管理器都有与比较单元相关的PWM 电路,能够产生六路带可编程死区和输出极性的PWM 输出,但是都是成对输出的,对于本控制器需要的独立的输出,每个事件管理器只有3 路,一个DSP 有两个事件管理器,可以独立的输出6 路PWM 波。液压控制器需要6 路PWM 波驱动电业比例阀,而伺服电机控制器需要4 路0-5V 的加速器信号调节电机转速,在设计电路时将这两种电路设计在一起,并制成印刷电路板,焊板时按每板的功能焊接即可,液压控制器需要输出PWM 波形,芯片用LM393($0.0737) 做比较器,此时电阻R19 和电容C71 不焊即可,但要有R21 上拉电阻,R17 和R18 将2 脚电压分在1.7V 左右比较合适。伺服控制器需要输出0-5V 电压芯片用LM2904($0.0925) 做运放用,焊电阻R19 和电容C17不用MOS 管、R21 和外接电源,也不用焊R17,直接将DSP 输出0-3.3V 电压放大到0-5V 输出。PWM/电压输出电路图见图1:
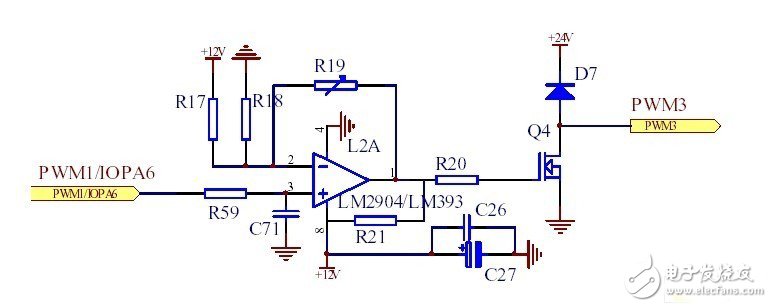
图1 PWM/电压输出电路
I\O 口:DSP 的数字I/O 口模块具有控制专用I/O 和复用引脚的功能,可以输出输入高低电平信号,根据其功能将其设计成开关量输出,输入,并用其控制继电器,作为控的开关。开关量输入只要用电阻分压即可,开关量输出使用光耦隔离,本设计用的光耦PC817($0.2210),比较适合DSP 使用。当DSP 输出高电平时继电器吸合,CNETA1 和CNETA2 两脚导通继电器电路图见图2:
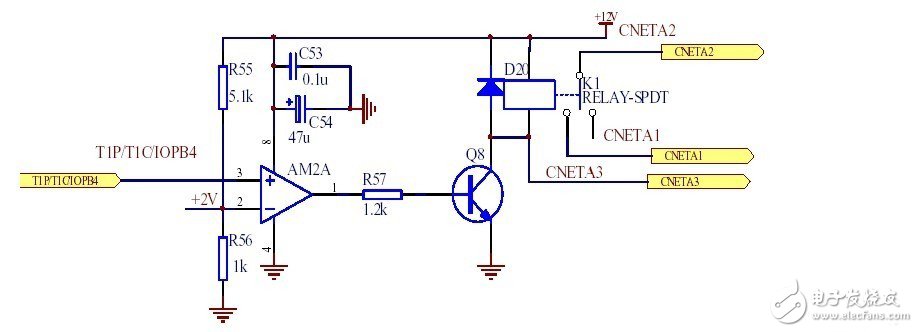
图2 继电器电路图
QEP 电路:DSP 的每个时间管理器都有一个正交编码器脉冲(QEP)电路。当QEP电路被使能时可以对CAP1/QEP1 和CAP2/QEP2(对于EVA 模块)引脚上的正交编码输入脉冲进行解码和计数。正交编码脉冲电路可用于连接光电编码器以获得旋转机械的位置和速率。伺服电机控制器需要使用QEP 电路,由于一个伺服电机控制器需要控制4 台伺服电机,所以码盘信号使用74153 芯片选择输入,同时码盘的每路信号都有正负两根线通过运放放大后再到74153 选择后输入DSP,码盘选择电路见图3:
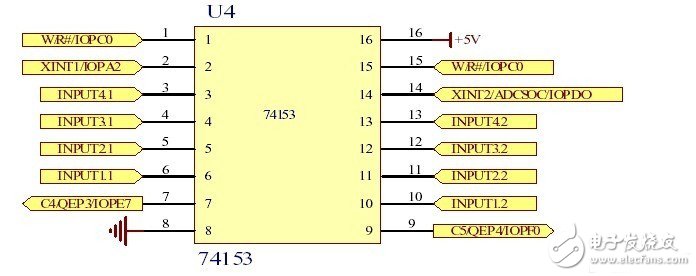
图3 码盘选择电路
其中W/R/IOPC0 为使能信号,XINT1/IOPA2 和XINT2/ADCSOC/IOPDO 构成选择信号,74153 通过选择信号的选择码选择一对信号从7 脚和9 脚输出给DSP。其他硬件电路设计包括电源、串口、CAN 总线和DSP 外围接线等都是典型的设计。整个机器人车设计经过安装调试,机械手完全符合设计要求,达到如下技术指标:最大作业幅度约2.5m;最大作业深度:地下1m;最大作业幅度下夹持提升力≤80kg;最大夹持弹药直径160mm;目前国内还没有这种专业的处理危险品的机器人批量生产,本产品的成功完成为将来的批量生产奠定了坚实的基础,市场潜力巨大。
接力竞赛机器人系统电路设计
接力机器人机械部分采用遥控汽车,造型时尚,色彩华丽,车上装配的火炬有“2008奥运”标志,内部七彩电子火焰舞动闪烁,令人赏心悦目。比赛开始,人工启动第一辆机器人小车,车上火炬同时点亮,当遇到下一辆机器人小车时,下一辆机器人小车火炬自动点亮并启动前进。为了渲染效果,在终点,还设计了艳丽鲜花构成的凯旋门,当机器人小车胜利到达终点凯旋门时,电路自动触发燃放焰火,声光相伴,具有很强的视觉冲击力
电路原理:一片电机驱动电路L293D($1.7100)、一个红外光电开关TCRT5000($0.4848)和一个电阻R2四样东西就构成了具有循迹功能的最简约的机器人。TCRT5000由一对相 “互隔开的红外发射和接收二极管构成,TCRT5000朝下安装在机器人小车底盘上。其中的发射二极管向地面发射红外线,接收二极管接收从地面反射的红外线。机器人使用了ATMAGE8单片机内部集成的模数转换功能,不同颜色的地面反射红外线的情况不同,因而接收二极管接收到的红外线信号强度也就不同,通过ATMAGE8单片机进行模数转换。

不同的红外线信号强度转换成不同的数值。据此就能识别地面的线迹,程序再通过电机驱动电路L293D控制车轮运动实现自动循迹。干簧管GHG是用来实现接力的,每辆车前端装磁铁,尾端装干簧管,后车靠近前车时,后车前端的磁铁作用于前车后端的干簧管,就传递了接力信号。红外发射二极管D3和红外接收二极管D4是用来配合机器人在完成接力后实现停车功能的。每辆车前端安装红外接收二极管D4,尾端安装红外发射二极管D3。当磁铁作用于干簧管,传递了接力信号后,前车通过后端的红外发射二极管D3发射红外线,后车通过前端的红外接收二极管D4接收到红外线后就停止前进。
更多机器人技术资料,电路图及DIY设计,可参见本期Designs of week——当中国制造遇上机器人技术,设计思维请跟上!

评论