电动智能小车的制作电路图


电动智能小车的制作
一、方案论证
1.路面情况检测方案的选择
探测路面黑线的基本原理:光线照射到路面并反射,由于黑线和白纸对光的反射系数不同,可根据接收到的反射光强弱来判断黑线,可实现的方案有以下几种:
方案一:采用普通发光二极管及光敏电阻组成的发射接收方案,电路如图1-1所示。该方案在实际使用时,容易受到外界光源的干扰,有时甚至检测不到。主要是因为可见光的反射效果跟地表的平坦程度、地表材料的反射情况均对检测效果产生直接影响。虽然可采取超高亮度发光二极管降低一定的干扰,但这有增加额外的功率损耗。
方案二:脉冲调制的反射式红外发射接收器。由于采用该有交流分量的调制信号,则可大幅度减少外界干扰;另外红外发射接受管的最大工作电流取决与平均电流,如果采用占空比小的调制信号,在平均电流不变的情况下,瞬时电流很大(50~100mA),则大大提高了信噪比。并且其反映灵敏,外围电路也很简单。电路如图1-2所示。
比较以上两种方案,方案二占有很大的优势,市场上很多红外光电探头也都是基于这个原理。这样不但能准确完成测量,而且能避免电路的复杂性,因此建议选择方案二。 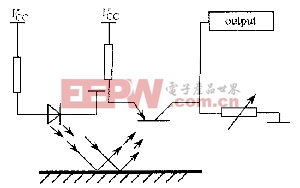
图1-1 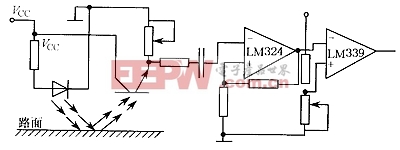
图1-2
2.电动机的选择
方案一:采用步进电机,步进电机的一个显著特点就是具有快速启停能力,如果负荷不超过步进电机所能提供的动态转矩值,就能够立即使步进电机启动或反转。另一个显著特点是转换精度高,正转反转控制灵活。
方案二:采用普通直流电机。直流电动机具有优良的调速特性,调速平滑、方便,调整范围广;过载能力强,能承受频繁的冲击负载,可实现频繁的无级快速启动、制动和反转;能满足各种不同的特殊运行要求。
由于普通直流电机更易于购买,并且电路相对简单,因此建议采用直流电机作为动力源。
3.电动机驱动方案的选择
方案一:采用电阻网络或数字电位器调整电动机的分压,从而达到调速目的。但是电阻网络只能实现有级调速,而数字电阻的元器件价格比较昂贵,且可能存在干扰。更主要的问题在于一般电动机的电阻比较小,但电流很大,分压不仅会降低效率,而且实现很困难。
方案二:采用继电器对电动机的开与关进行控制,通过控制开关的切换速度实现对小车的速度进行调整。这个电路的优点是电路较为简单,缺点是继电器的响应时间长,易损坏,寿命较短,可靠性不高。
方案三:采用四个大功率晶体管组成H桥电路,四个大功率晶体管分为两组,交替导通和截止,用单片机控制使之工作在开关状态,进而控制电动机的运行。该控制电路由于四个大功率晶体管只工作在饱和与截止状态下,效率非常高,并且大功率晶体管开关的速度很快,稳定性也极强,是一种广泛采用的电路。
基于以上的分析,建议电动机驱动电路选择方案三。
4.路程检测方案的选择
方案一:采用霍尔元件集成片,该器件内部由三片霍尔元件组成,当磁铁正对金属板时,由于霍尔反应,可以产生电流的变化,对此加以判断,但需要在车轮上安装磁片,将霍尔集成片安装在固定轴上,通过对脉冲的计数进行对车速的测量。
方案二:采用光电码盘进行检测。光电码盘测距基本原理如图1-3所示。旋轴转动,带动码盘转动,码盘上刻有许多狭缝,码盘转动时发射光透过狭缝被接受元件接受。用计数器对接受到的信号进行计数。用这种方案能很精确的算出小车已经走过的距离。
以上两种都是比较可行的转速测量方案,霍尔元件在工业上得到广泛采用,但本题小车的车轮较小,磁片安装十分困难。容易产生相互干扰。因而建议选择方案二。 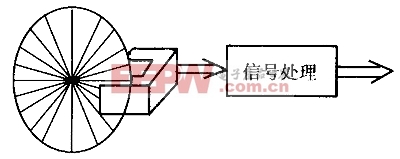
图1-3
5.障碍物探测方案的选择
方案一:脉冲调制的反射式红外发射接收器。由于采用该有交流分量的调制信号,则可大幅度减少外界干扰;另外红外发射接受管的最大工作电流取决与平均电流,如果采用占空比小的调制信号,在平均电流不变的情况下,瞬时电流很大(50~100mA),则大大提高了信噪比。并且其反映灵敏,外围电路也很简单。电路工作原理如图1-2所示。
方案二:采用超声波传感器,如果传感器接受到反射的超声波,则通知单片机前方有障碍物,否则通知单片机可以向前行驶。
市场上很多红外光电探头也都是基于这个原理。这样不但能准确完成测量,而且能避免电路的复杂性,因此建议选择方案一。
6.供电电源方案的选择
方案一:采用两个电源供电。将电动机驱动电源与单片机以及其周电路电源完全隔离,利用光电耦合器传输信号。这样可以使电动机驱动所造成的干扰彻底消除,提高了系统的稳定性,但是多一组电池,增加了车身重量,增大了小车的惯性。
方案二:采用单一电源供电。电源直接给电动机供电,因电动机启动瞬间电流较大,会造成电源电压波动,因而控制与检测部分电路通过集成稳压块供电。其供电电路比较简单,
通过比较,小车的机动性和灵活性更为重要,供电电路建议采用方案二为好。
二、具体设计与实现
单片机为小车的控制核心,电路由黑线检测模块,电机驱动模块,声光指示模块,红外线探测模块,方向控制模块,等几部分构成(金属探测、超声波测距及显示模块为发挥部分)。系统框图如图1-4所示。 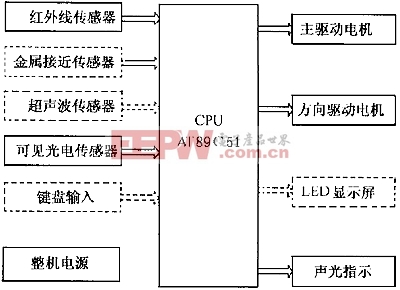
图1-4
1.系统硬件设计
(1)路面黑线检测设计与实现
当检测到黑线时,红外光管接收到反射回来的红外光,其输出立即发生高低电平跳变,该信号经放大整形后送单片机分析处理。为保证小车延黑线行驶,采用了两个检测器并行排列。在小车行走过程中,若向左方向偏离黑线,则右侧的探头就会检测到黑线,把信号传给单片机。,单片机控制车头向右转。路面黑线检测电路如图1-5所示。
(2)电动机驱动电路设计与实现
由四个大功率晶体管组成H 桥电路组成,四个晶体管分为两组,交替导通和截止,以保证小车完成前进、后退、左传、右转等运行动作。原理图如图1-6所示。
评论