遥控机器人电路


图2-36为遥控机器人电路。图2-36(a)为电路框图,图2-36(b)是工作时序图。机器人右转至停止不动的过程如下:电路中,发送超声波的电路由40kHz振荡电路与驱动电路组成。接收超声波采用两个传感器:一个接收传感器安装在机器人的上方;另一个安装在机器人的前方。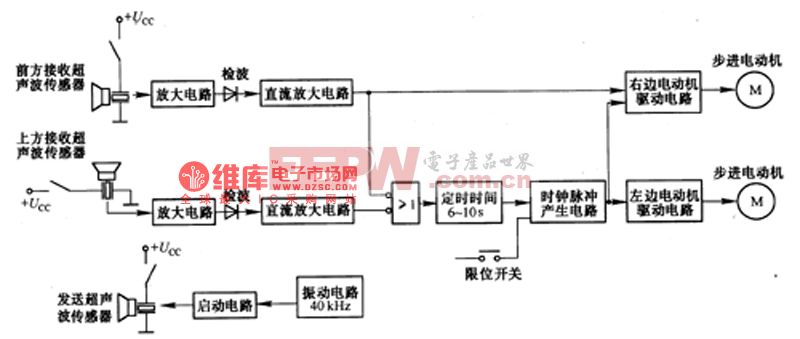
在图2-36(b)所示的①区间,上方超声波传感器接收的超声波信号,由其放大电路进行放大,经过二极管检波再进行直流放大,变为逻辑电平驱动定时电路工作。定时电路的输出控制,用于驱动电动机的时钟脉冲振荡器的振荡。为此,定时电路工作期间,左边电动机正转,右边电动机反转,机器人右转。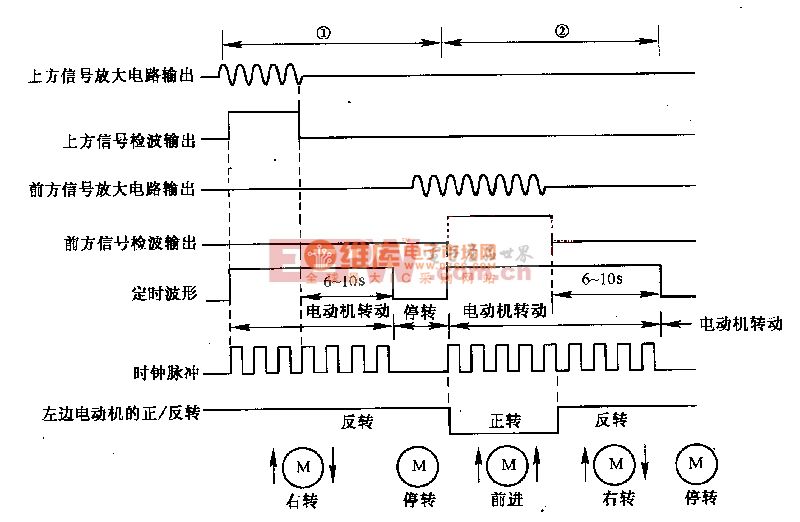
定时电路设定时间为6一10S,上方传感器检测超声波之后6一10S,时间内,机器人右转。若过了定时电路的设定时间,则机器人停止不动。
机器人前进至右转工作过程如下:在图2-36(b)所示的②区间,若前方超声波传感器接收超声波信号,则前方超声波信号→检波输出→直流放大电路的逻辑电平信号变为低电平,这就是右边步迸电动机的正转信号,定时电路开始工作。
这时,右边电动机正转,机器人前进。前方传感器检测无超声波信号之后,定时电路工作,因此,左边电动机正转,右边电动机反转,机器人再次右转。
图2-36(c)为超声波发送电路。电路中,超声波发送传感器采用M叭40耕5,由Fl和岛构成多谐振荡器,振荡频率为40kHz,用旺1进行调整。由巴一R构成传感器的驱动电路。
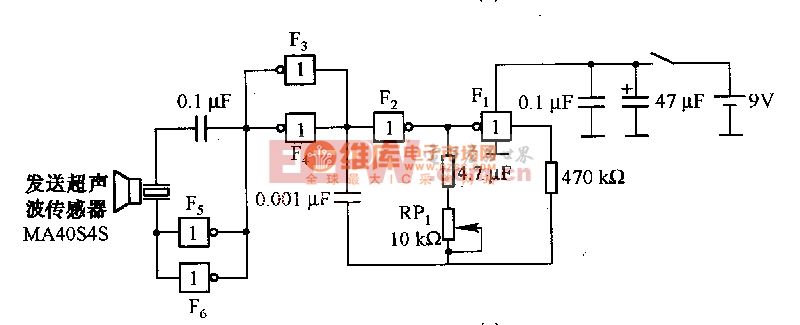
图2-36(d)是超声波接收与电动机驱动电路。电路中,超声波接收传感器部采用MA4OS4R;Al和A2分别为前方与上方传感器接收信号的放大电路;RP1用于调整接收信号的灵敏度;VD2和VD4用于检波;VD5和VD6几分别显示前方和上方传感器的检测情况。VT1集电极输出低存苛电平时,电动机正转板转;Fl输出高/低电平时,电动机转动停转;RP2用于调整时钟脉冲振荡电路的振荡频率,可以改变步迸电动机的转速。
评论