
伺服回路用旋转编码器电路图原理

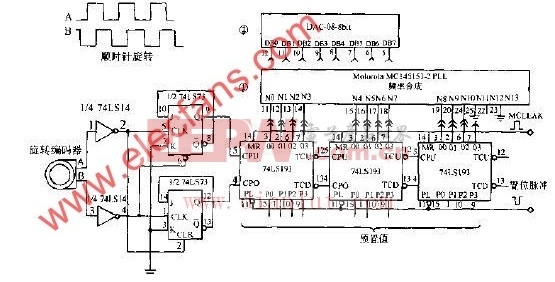
如图所示是伺服回路用旋转编码器电路图。此编码器可将旋转运动变换成两个输出称90°相移的类似电波形,能用于机器人、打印机和其他基于伺服回路的设备,用来监视旋转的方向和速度,确定移动部件的位置。本电路为每个编码器的周期只提供一个上升脉冲或现将脉冲。在顺时针旋转时,波形A超前,其下降沿将使JK触发器的Q输出置于高电位。在逆时针旋转时,请客相反,上触发器保持低点位,另一触发器则脉动;根据旋转方向,计数器增加或递减其输出编码,反过来在控制伺服装置。在基于伺服回路的应用场合,增量旋转编码器可以监视旋转的方向和速度,以及确定活动部件的位置。
评论