
复合笼条转子异步电动机起动性能的研究

本文建立了复合笼条转子感应电动机在d,q,0坐标系下的动态方程。基于建立的数学模型对一台复合笼条转子感应电动机的起动过程进行了仿真分析,仿真结果与实际结果基本吻合。同时,研究了转子磁导率和电阻率对起动性能的影响,得到了一些有益的结论。
关键词:复合笼条转子 异步电动机 仿真
1 引言
众所周知,普通异步电动机的起动转矩小,起动电流大。这使得它在某些场合的应用受到了限制。为了改善普通感应电机的起动性能,许多学者进行了有意义的研究。先后提出了双鼠笼电机,转子采用刀形、凸形槽等方法来提高电机的起动转矩。20世纪初国外学者提出了实心转子异步电动机,它具有高起动转矩和低起动电流的特点,但其效率和功率因数较差。为了既有起动转矩大、起动电流小的特点;又兼顾效率和功率因数高,我们提出了复合笼条转子异步电动机。本文基于交流电机理论仿真分析了这种电机起动性能,并研究了转子槽内材料磁导率和电阻率的变化对这种电机起动性能的影响。
2 复合笼条异步电动机的仿真数学模型
2.1 复合笼条转子异步电动机的特点
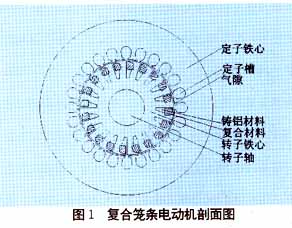
复合笼条转子异步电动机定子结构、电磁关系与普通笼型感应电动机相同,所不同的是它的转子结构。电机的剖面图如图1所示。复合笼条转子采用双鼠笼结构,上层笼采用高电阻率材料,该复合材料是用一定比例的铜铁合金材料构成,下层笼采用铸铝材料,端部是由铝构成端部回路。采用这种复合材料制成的上层笼条,可通过改变电阻率ρ和磁导率μ而改变起动转矩和起动电流的大小。
2.2 复合笼条转子感应电动机的数学模型
根据文献,在不计铁心饱和,忽略谐波磁势影响,气隙均匀的情况下,复合笼条转子异步电动机的基本方程为: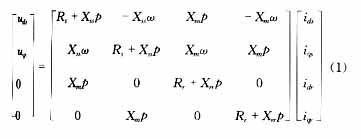
式中:下标s,r分别代表定子、转子各分量;
下标d,q分别代表d,q,0坐标系下的量;
?Xss为定子自电感;
Xrr为转子自电感;
Xm为定转子间互感;
Rs为定子电阻;
Rr为转子电阻;
p为微分算子;
ω为转子角速度;
i为电流;
u为电压。
定子自感Xss=Xm+X1σ,转子自电感Xrr=Xm+X2σ,X1σ和X2σ分别为定转子漏感。
式(1)可改写成状态方程的形式并简记为:
其中I为电流矩阵;X为电感矩阵;U为电压矩阵;R为电阻矩阵;G为与旋转电势有关的电感矩阵。
复合笼条转子异步电动机转子运动方程为:
式中:H为转动惯量;
?Mm为机械负载转矩;
将式(2)、(3)合并起来即得复合笼条转子异步电动机的状态方程。记为:
式中:u为输入电压矩阵;
?t为连续时间。
3 仿真分析
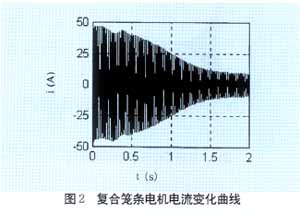
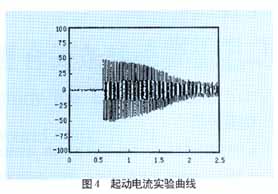
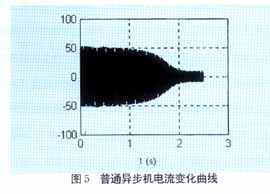
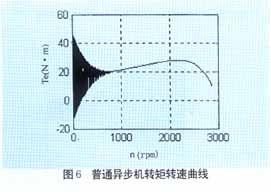
为了研究复合笼条转子异步电动机的起动性能,我们制造了一台3KW的该电动机。对其进行了实验,得到了该电机实测参数和起动时电流曲线、转速转矩曲线。电机的实测参数为p=3KW,Ist=31.2,Test=24N.m,cosΦ=0.81,η=78.5%。给该电机加380V,50Hz的额定电压,带额定负载,利用建立的数学模型对该电机起动过程进行了仿真,得到了起动时电流变化曲线如图2所示和转矩转速曲线如图3所示,并与实验曲线进行了比较,说明了仿真的正确性。实验电流曲线如图4所示,转矩转速曲线如图3中的虚线。图5,图6给出了普通3KW、2极感应电动机的起动电流变化曲线和转矩转速变化曲线,与图2,3比较,可得知复合笼条感应电动机具有良好的起动性能。
4 转子材料对复合笼条感应电动机起动特性的影响
4.1 转子笼条电阻率的影响
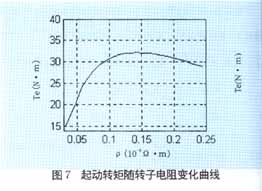
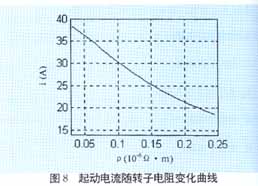
根据电机设计的知识,通过不同转子电阻下的仿真结果,可以得到起动转矩随笼条电阻率的变化曲线(如图7所示)和电流随转子电阻率的变化曲线(如图8所示)。一般认为电阻率增大,起动转矩增大。但从曲线可以看出当转子电阻率增大到一定范围时,转矩随转子电阻率的增大反而减小。从仿真结果知,转子电阻率增大,起动时间加长,故转子电阻率增大并不一定对起动有利。
4.2 转子笼条磁导率的影响
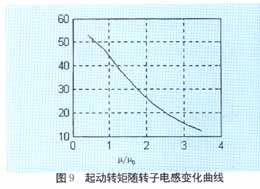
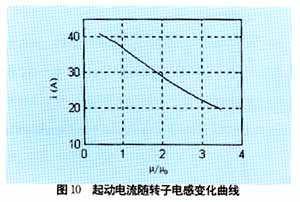
根据电机设计的知识,通过不同转子漏抗下的仿真结果得到了起动转矩随转子笼条磁导率变化曲线(如图9所示)、起动电流随笼条磁导率变化曲线(如图10所示)。可以看出随磁导率的增加,起动转矩和起动电流都在减小,为了获得较小的起动电流可以增大磁导率,但必然减小起动转矩,所以在设计电机时,应根据设计要求选择两者的最佳结合点。磁导率越大,电机起动时间越长,当磁导率大到一定时,由于转矩减小,电机将无法起动。
5 结论
(1)采用复合笼条的异步电动机比采用铸铝笼条的起动转矩大,起动电流小。
(2)起动电流随笼条电阻率的增大而减小,当电阻率为铸铝电阻率的约3.5倍时,起动转矩最大。
(3)起动转矩和电流随笼条磁导率的增大基本按线性减小。
参考文献:
[1]D.C.White,H.H.Woodson.Electromechanical Energy Conversion[M].Wiley Sons,1959
[2]C.M.Ong“Dynamic simulaTIon of electric machinery using Matlab/Simulink”[S].Ed.Mc GrawHill.1998,New Jersey pp.202-204
[3]J.Appelbaum,I.A.Khan,and E.F.Fuchs,“OpTImizaTIon of three_phase inducTIon motor design.Pt Ⅱ:The efficiency and Cost of an option design”[J].IEEE Trans.On Energy Conversion Vol.Ec-2,1987,pp.145-422
[4]R.Ramarathman and B.G.Desai,“Optimization of polyphase induction motordesign_A nonlinear programming approach”[J].IEEE trans.On Power Apparatus and Systems.Vol PAS-80,1971,pp.570-578
评论