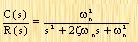
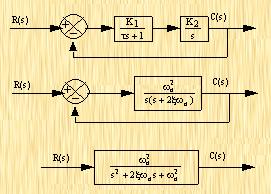
在分析或设计系统时,二阶系统的响应特性常被视为一种基准。虽然在实际中几乎没有二阶系统,而是三阶或更高阶系统,但是它们有可能用二阶系统去近似,或者其响应可以表示为一、二阶系统响应的合成。因此,将对二阶系统的响应进行重点讨论。 典型的二阶系统的方框图如图3-6所示,它由一个非周期环节和一个积分环节串联组成,系统的传递函数为 令 则
从上式不难求得闭环系统的极点为  | (3-12) |
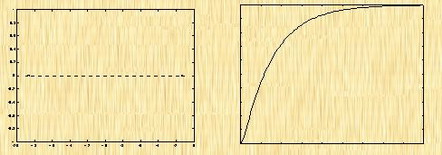
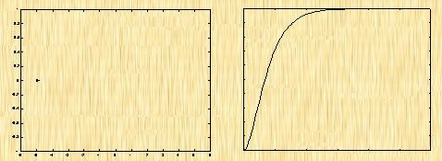
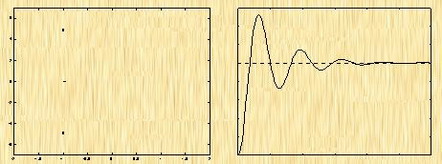
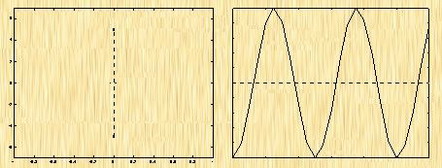
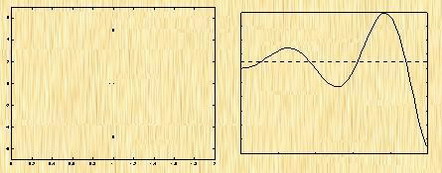
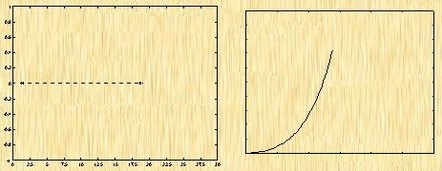
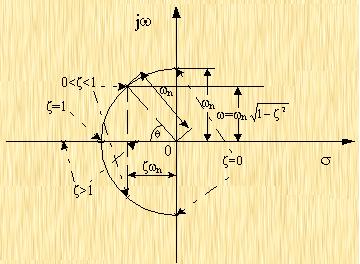
式中 ζ :阻尼比 ωn:无阻尼自然振荡角频率 振荡角频率ωd的单位本为rad/s,但因弧度本身无量纲,只表示比值的概念。在研究控制系统时习惯上写为s-1,同时也常简称ωd为频率。 由式(3-12)可知,系统极点的实部为σ,它控制着时间响应的暂态分量是发散还是衰减,以及暂态分量随时间的变化率。当σ>0时,暂态响应随时间增长而发散,当σ<0时,暂态响应随时间增长而衰减。由于σ=-ζωn,且ωn不可能为负值,所以,又可以看出,当 ζ<0时,系统暂态响应将随时间增长而发散,而当 ζ>0时,系统暂态响应才能随时间增长而衰减。 当阻尼比ζ=1时,系统具有两重实极点,于是系统暂态响应中没有周期分量,暂态响应将随时间按指数函数规律而单调衰减。此时称系统处于临界阻尼情况。 当ζ=0时,系统将具有一对纯虚数极点,其值为s1,s2=±jω此时称系统处于无阻尼状态,系统的暂态响应将是恒定振幅的周期函数,并且将 称为无阻尼自然振荡角频率,或简称为无阻尼自然振荡频率。 当0< ζ<1时,系统具有一对实部为负的复数极点,系统的暂态响应将是振幅随时间按指数函数规律衰减的周期函数,此时称系统处于欠阻尼状态。 在图3-7中表示出当 为不同值时,相应系统极点的分布与阶跃响应的图形。 (a) ζ>1(左半平面有相异实根)时系统响应 (b) ζ=1(左半平面有相同实根)时系统响应 (c)0< ζ<1(左半平面有带负实根的共轭虚根)时系统响应 (d)ζ =0(虚轴上带共轭虚根)时系统响应 (e)0>ζ >-1(右半平面有带正实根的共轭虚根)时系统响应 (f) ζ<-1(右半平面有相异正实根)时系统响应 图3-8说明系统极点的位置与ζ 、ωn 、σ及ωd之间的关系。对于标出的一对共轭复数极点ωn是从极点到s平面原点的径向距离,σ是极点的实部,ωd是极点的虚部,而阻尼比ζ等于极点到s平面原点间径向线与负实轴之间夹角的余弦,即 ζ=cosθ 阻尼比ζ是二阶系统的重要特征参量。
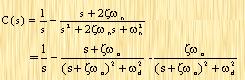
3.5.1二阶系统的单位阶跃响应 下面分析过阻尼、临界阻尼和负阻尼三种情况下,二阶系统的单位阶跃响应。 (1) 欠阻尼情况( 0< ζ<1 ) 此时 式中 ,ωd频率叫阻尼自然频率。对于单位阶跃输入,C(s)可以写成 ,ωd频率叫阻尼自然频率。对于单位阶跃输入,C(s)可以写成 为求出上式的拉普拉斯反变换,将上式写成下列形式 其拉普拉斯反变换为  | (3-13) |
由上式可以看出,暂态振荡频率为阻尼自然频率,它是随阻尼比ζ而变化的。这一系统的误差信号,是输入量与输出量之差,即 显然,这个误差信号为一阻尼正弦振荡。稳态时或t=∞时,输入量与输出量之间不存在误差。 如果阻尼比ζ等于零,那么系统的响应变为无阻尼等幅振荡。将ζ=0值代入(3-13),便可得到零阻尼情况下的响应c(t),即 从上式可以看出,ωn代表系统的无阻尼自然频率。即如果阻尼系数减少到零时,系统将以频率ωn振动。如果线性系统具有一定阻尼,就不可能通过实验得到无阻尼自然频率,而只能得到阻尼自然频率ωd,ωd 等于 。阻尼自然频率总是低于无阻尼自然频率ωd。ζ值增大时,阻尼自然频率ωd将减小。如果ζ增加到大于1,系统的响应将变成过阻尼,因而不再产生振荡。 。阻尼自然频率总是低于无阻尼自然频率ωd。ζ值增大时,阻尼自然频率ωd将减小。如果ζ增加到大于1,系统的响应将变成过阻尼,因而不再产生振荡。 (2) 临界阻尼情况(ζ=1) 如果C(s)/R(s)的两个极点接近相等,则系统可近似看作临界阻尼系统。对于单位阶跃输入量,R(s)=1/s,因而C(s)可表示为 上式的拉普拉氏反变换为: (3) 过阻尼情况(ζ>1) 这种情况下,C(s)/R(s)的两个极点是两个不等的负实数。对于单位阶跃输入量,R(s)=1/s,因此C(s)可以写成 其拉普拉斯反变换为 式中 ,而 ,而  ,显然,这时系统的响应c(t)包含着两个衰减的指数项。 ,显然,这时系统的响应c(t)包含着两个衰减的指数项。 当ζ远大于1时,在两个衰减的指数项中,一个比另一个衰减的要快得多,因此衰减得比较快的指数项(相应于较小时间常数的指数项),就可以忽略不计。也就是说,如果-s2与j 轴的距离比-s1要近得多(即|s1|>>|s2| ),那么在近似解中,可以忽略-s1,因为方程中包含s1的项比包含s2的项衰减得快的多,所以-s1对系统响应的影响,比-s2对系统的影响要小得多,因此忽略-s1是合理的。因此可以将C(s)/R(s)近似地表示为 这一近似函数形式是根据下述条件直接得到的,即原来的函数C(s)/R(s)与近似函数的初始值和最终值,两者是完全相同的。 对于近似传递函数C(s)/R(s),其单位阶跃响应可表示为 其时间响应c(t)为 在过阻尼情况下,二阶系统的单位阶跃响应是随时间推移而单调增长,最后在t→∞时趋于稳态值,所以最大超调量是零,调整时间可以用近似的单位阶跃响应估算,如借用一阶系统单位阶跃响应的性质,可以认为响应达到稳态值的95%所需的调整时间 工程上,如果ζ》1.5时,使用上述近似式已有足够的准确度了。
3.5.2 二阶系统的暂态响应指标 当系统为欠阻尼情况下,即0< ζ<1时,二阶系统阶跃响应的上升时间tr、峰值时间tp、最大超调量Mp的计算公式按式(3-13)可表示如下。 上升时间tr 令c(t)=1,代入式(3-13)中,即可求得tr。这时有 或 所以  | (3-14) |
由上式可见,如欲减小tr,当ζ一定时,需增大ωn ,反之,若ωn一定时,则需减小ζ。 峰值时间tp 出现第一个峰时,单位阶跃响应随时间的变化率为零。为求tp,可将式(3-13)对时间t求导,并令其为零。于是得 由此可知:  | n=0、1、2、…… |
到达第一个峰值时应有 故得  | (3-15) |
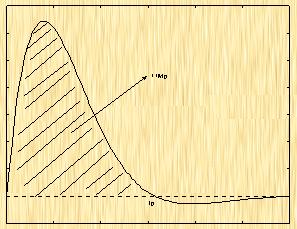
最大超调量Mp 最大超调量发生在t=tp,因此,令式(3-13)中的t=tp,并将tp值代入,即得以百分比表示的超调量  | (3-16) |
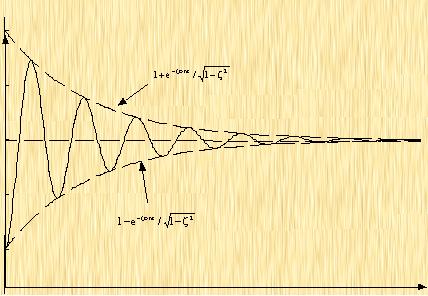
调整时间ts 对于欠阻尼二阶系统,暂态响应可由式(3-13)求得为 曲线 ,是系统对单位阶跃输入信号的暂态响应曲线的包络线,响应曲线c(t)总是包含在一对包络线之内,如图3-9所示。包络线的时间常数为1/(ζωn)。这样,当采用5%允许误差时,有 ,是系统对单位阶跃输入信号的暂态响应曲线的包络线,响应曲线c(t)总是包含在一对包络线之内,如图3-9所示。包络线的时间常数为1/(ζωn)。这样,当采用5%允许误差时,有 1+ =1.05 =1.05 |
由上式得 当0< ζ< 0.8时,则有 当采用2%允许误差时,则可推导得出
3.5.3二阶系统的脉冲响应
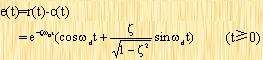
当输入信号r(t)为单位脉冲函数时,相应的拉普拉斯变换为1,即R(s)=1。则二阶系统的单位脉冲响应C(s)为 这个方程的拉普拉斯反变换,就是时域响应解c(t),这时当0≤ζ<1时, c(t)= (t≥0) (t≥0) |
当ζ=1时 c(t)= (t≥0) (t≥0) |
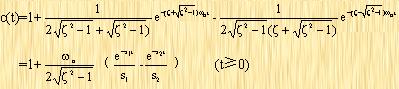
当ζ>1时 c(t)= (t≥0) (t≥0) |
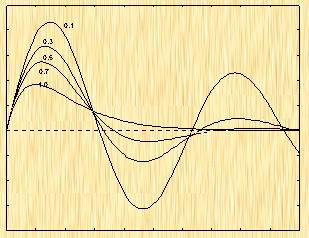
不同ζ时单位脉冲响应曲线见图3-10。对ζ≥1的情况,单位脉冲响应总是正值或在t=∞时为零。这时系统的单位阶跃响应必是单调增长的。 由于单位脉冲响应是单位阶跃响应的导数,所以单位脉冲响应曲线与时间轴第一次相交的点对应的时间必是峰值时间tp,而从t=0至t=tp这一段曲线与时间轴所包围的面积将等于1+Mp(参见图3-11),而且单位脉冲响应曲线与时间轴包围的面积代数和为1。 3-10 图示系统中 ζ=0.6,ωn =5弧度/秒。当系统受到单位阶跃输入信号作用时,试求上升时间tr、峰值时间tp、最大超调量Mp和调整时间ts。 解:根据给定的 ζ和 ωn值,可以求得ωd =  =4和 σ=ζωn =3。 =4和 σ=ζωn =3。 1. 上升时间tr 上升时间为: tr=  = =  式中β为:  弧度 弧度 因此,可求得上升时间tr为:tr= =  秒 秒 2. 峰值时间tp 峰值时间为: tp=  = =  =0.785秒 =0.785秒 3. 最大超调量Mp 最大超调量为: Mp=  = =  =0.095 =0.095 因此,最大超调量百分比为9.5%。 4. 调整时间ts 对于2%允许误差标准,调整时间为: ts=  =4/3=1.33秒 =4/3=1.33秒 对于5%允许误差标准,调整时间为: ts=  =3/3=1秒 =3/3=1秒 | 












评论