
基于SVPWM的永磁同步电机矢量控制系统设计

引言
基于正弦波的永磁同步电机(简称PMSM)具有功率密度大、效率高、转子损耗小等优点,在运动控制领域得到了广泛的应用。矢量控制主要采用脉宽调制(PWM)技术来控制输出电压并减小谐波。其中,SVPWM具有系统直流母线电压利用率高、开关损耗小、电动机转矩波动小等优越性能,因此,PMSM的矢量控制已被证明是一种高性能的控制策略。
本文借助PMSM数学模型,分析了同步电动机的矢量控制原理和SVPWM调制方法,同时借助Matlab强大的仿真建模能力,构建了SVPWM同步电动机矢量控制系统的仿真模型,并通过仿真实验予以验证。
1 PMSM数学模型
永磁同步电机的矢量控制基于电机的dqO坐标系统。在建立数学模型前,可先作以下几点假设:即忽略铁心饱和,不计涡流及磁滞损耗,转子上没有阻尼绕组,永磁材料的电导率为零,电机电流为对称的三相正弦电流。在上述假设的基础上,运用坐标变换理论,便可得到dqO轴下PMSM数学模型。
该模型的电压、磁链、电磁转矩和功率方程(即派克方程)如下:
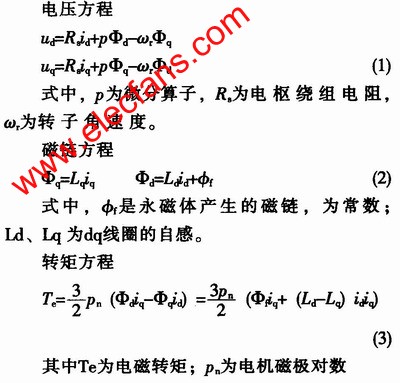
2 矢量控制系统
2.1 矢量控制基本原理
矢量控制的基本思想是在磁场定向坐标上,将电流矢量分解成两个相互垂直,彼此独立的矢量id(产生磁通的励磁电流分量)和iq(产生转矩的转矩电流分量),也就是说,控制id和iq便可以控制电动机的转矩。
按转子磁链定向的控制方法(id=0)就是使定子电流矢量位于q轴,而无d轴分量。此时转矩Te和iq呈线性关系(由上转矩方程),因此,只要对iq进行控制,就可以达到控制转矩的目的。既定子电流全部用来产生转矩,此时,PMSM的电压方程可写为:

通过上面的简化过程可以看出,只要准确地检测出转子空间位置的θ角,并通过控制逆变器使三相定子的合成电流(磁动势)位于q轴上,那么,通过控制定子电流的幅值,就能很好地控制电磁转矩。此时对PMSM的控制,就类似于对直流电机的控制。
2.2 矢量控制调速系统的控制组成
在电机起动时,就应当通过软件进行系统初始定位,以获得转子的实际位置,这是永磁同步电机实现矢量控制的必要条件。首先,应通过转子位置传感器检测出转子角位置ωr,同时计算出转子的速度n,然后检测定子(任两相)电流并经矢量变换,以得到检测值id和iq,然后分别经PI调节器输出交直流轴电压值ud和uq,再经过坐标变换后生成电压值uα和uβ,最后利用SVPWM方法输出6脉冲逆变器驱动控制信号。图l所示是PMSM矢量控制原理图。
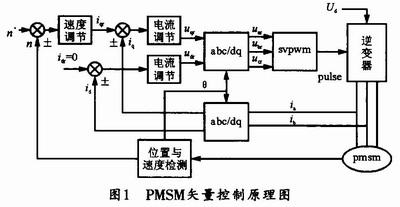
由图1可知,由外环的转速和内环的电流环可以构成PMSM的双闭环控制系统。该控制系统中应用了空间电压矢量(SVPWM)脉宽调制技术,由于SVPWM的开关损耗小、电压利用率高、谐波少,因而大大提高了PMSM的调速性能。
3 SVPWM原理
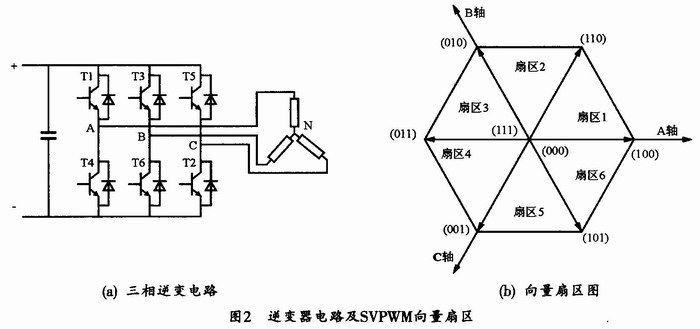
本文的矢量控制系统中的逆变器PWM采用的是电压空间矢量脉宽调制(SVPWM)技术。SVPWM技术主要是从电机的角度出发,它着眼于如何使电机获得幅值恒定的圆形旋转磁场(即正弦磁通)。三相负载相电压可以用一个空间电压矢量(目标矢量)来代替。通过控制三相逆变器开关器件的通断,可以得到用于合成目标矢量的基本矢量。图2所示是典型的三相逆变器电路及其SVPWM向量扇区图。图中引入了A、B、C桥臂的开关变量Sa、Sb、Sc,当某桥臂的上管导通而下管关断时,其开关变量值为1;当下管导通,上管关断时,开关变量值为0。因此,整个三相逆变器共有8种开关状态,即(SaSbSc)为(000)到(111),分别对应逆变器的8种输出电压矢量,其中2种为零矢量,6种非零矢量可将平面分为6个扇区。图3所示是产生SVPWM的具体实现步骤。其实现可通过Simulink模块库来搭建。
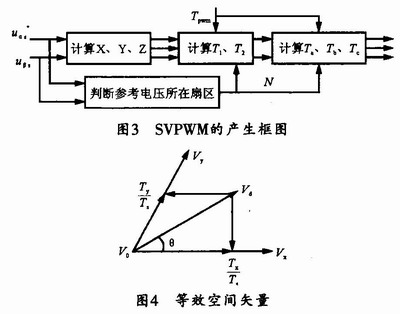
现以第一扇区为例来计算基本矢量的作用时间,其空间电压矢量Vd的位置如图4所示。假如在开关周期Ts内,矢量Vx、Vy、V0的作用时间分别为Tx、Ty、T0,则有:
式(7)中,Vph为相电压基波幅值,由(7)式可得到扇区中基本矢量Vx、Vy、V0的作用时间,并由此决定逆变器各开关状态的作用时间。
4 仿真分析
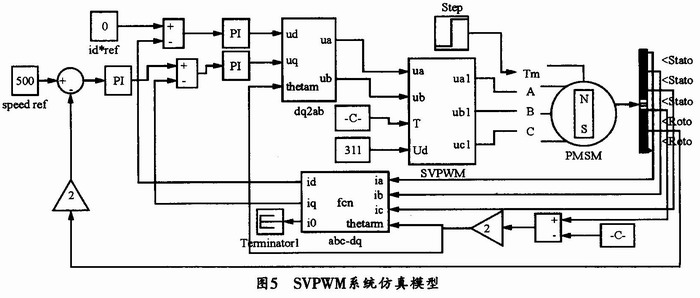
在MATLAB/simulink下所建立的该矢量控制系统的仿真模型如图5所示。该系统采用双闭环控制,外环为速度环,内环为电流环。仿真参数是:PMSM额定电压为380 V,频率为50 Hz,极对数p=2,Rs=2.85,纵轴和横轴电感Ld=Lq=2.21mH,转子磁通ψf=0.175Wb,三角载波周期T=0.0002s,幅值取T/2。直流侧电压Ud=310 V,转速给定初始值为500 rad/s。
本实验的目的是观察电机各输出量随转矩指令值变化的动,静态响应。实验中,在给定参考转速n=500rad/s的情况下,分别按转矩TL=0进行仿真,再按0~0.2s转矩从TL=2 N·m突变到TL=10N·m的动态仿真。仿真实验所得到的电流、转速和转矩波形如图6所示。
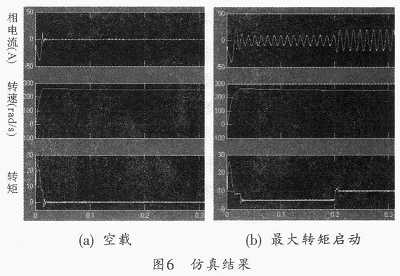
其中图6(a)是空载运行时的仿真结果,其稳态电流、转矩为0;图6(b)是电机以最大转矩启动时的仿真结果,由图可见,定子有短暂的冲击电流,但稳态电流波形较好,速度跟随也较快。综上所述可见,本实验具有转矩脉动小、电流波形好、系统响应迅速等优点。
5 结束语
本文对永磁同步电机矢量控制的基本原理及SVPWM调制方式进行了分析,并采用Matlab/simulink建立了该矢量控制系统的仿真模型,而且通过实验进行了验证。仿真和实验结果表明,该控制系统具有动、静态性能好,输出电流正弦度高等优点,可为分析和设计PMSM控制系统提供有效的手段和工具,也为实际电机控制系统的设计和调试提供了新的思路。
评论