dsPIC30F6010双闭环矢量法在电机控制中的应用


摘要:基于dsPIC30F6010芯片,采用全数字双闭环矢量法控制三相交流异步电动机,研究找出实现三相交流异步电机控制的实用方法。实验结果表明,电机起动快速、运行平稳,具有较宽的调速范围,精度较高,当测量转速达到1000 r/min以上时,转速精度小于等于0.8%,满足了三相交流异步电动机的调速控制需求。
引言
长期以来,交流异步电动机的调速是一个难题。直到20世纪70年代,由于计算机的产生,以及新型快速电力电子元件的出现,才使得交流异步电动机的调速成为可能。交流电机变频调速是当今节约电能、改善生产工艺流程、提高产品质量以及改善运行环境的一种重要手段。
以兼具单片机控制性能强、价格低廉的特点和DSP运算优点的dsPIC30F6010作为控制芯片,采用全数字双闭环矢量法控制三相交流异步电动机,是目前开发研究的热点,对变频器的改进和三相交流异步电动机的控制具有一定的参考价值。
1 三相交流异步电动机的数学模型
在静止α、β坐标系统中,异步电机状态方程为:
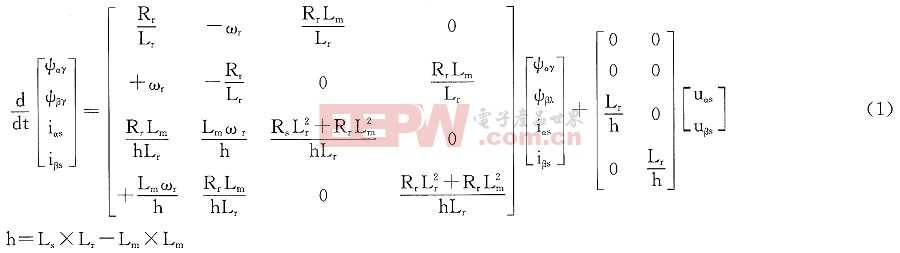
其中:Rs为定子绕组电阻;P为微分算子;Rr为转子绕组电阻;Ls为α轴定子和转子绕组等效电感;ωr为转子角速度;Lr为β轴定子和转子绕组等效电感;Lm为α、β坐标系统中定子与转子间同轴等效绕组间的互感。
电机的电磁转矩方程为:

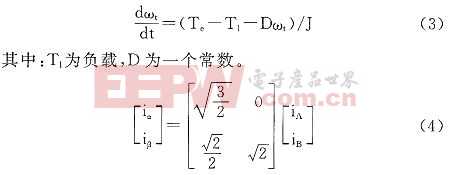
因此,检测两相电流iα与iβ可以根据矩阵表达式(4)计算定子静止两相电流分量iα与iβ,称为Clarke变换。相反,如果已经知道定子静止两相电流分量iα与iβ,那么就可以进行Clarke逆变换。

2 控制系统硬件结构设计
开发板采用美国微芯公司的dsPICDEM 1.1电机开发板,如图1所示。主芯片是dsPIC30F6010,具有液晶显示模块;A/D转换功能接口;LED、开关、按键、电位器和温度传感器;编码器接口;RS232串口;捕捉接口;RS485端口;晶振为7.372 8 MHz;支持MPLAB ICD2和MPLAB ICE 4000仿真器,配套IDE软件开发环境。
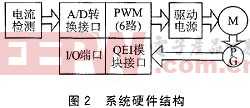
系统硬件结构如图2所示。速度传感器用来检测速度;控制器是用来接收检测的定子电流信号和速度信号,发出PWM信号;驱动电源用来检测定子电流信号、做交-直-交的变换来控制电机。
3 控制系统的软件设计
3.1 开环控制结构设计
通过dsPIC30F6010的软件,设定载波频率为10~20kHz(这个频率段正弦逼近程度是最好的,而且在IPM开关频率之内),该控制器的MCPWM模块的三对PWM口(H为高端接IGBT的上桥臂,L为低端接IGBT的下桥臂),采用中心对齐模式发出PWM控制信号(该配置将在每一个周期内产生两个线一线脉冲,有效开关频率加倍,纹波电流减小,同时并未增加功率器件的开关损耗)。通过死区寄存/4,所以4倍频PLL 后,Fcy=Fosc)。
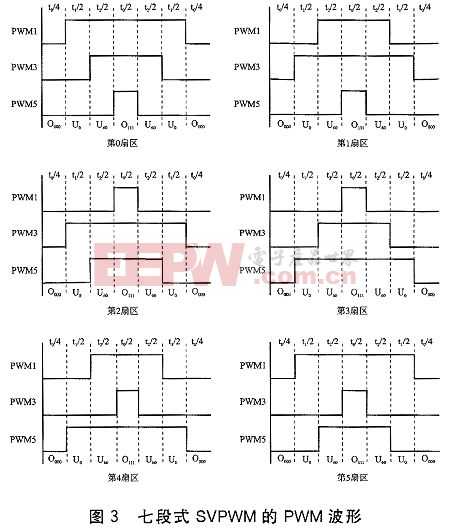
启动采用SVPWM开环控制。本文选用七段式电压空间矢量PWM波形,由3段零矢量和4段相邻的两个非零矢量组成,3段零矢量分别位于PWM波的开始、中间和结尾。其中每个扇区Ux、Ux±60的选择顺序为第0扇区,Ux=U0、Ux±60=U60;在第1扇区,Ux=U120、Ux±60=U60;在第 2扇区,Ux=U120、Ux±60=U180;在第3扇区,Ux=U240、Ux±60=U180;在第4扇区,Ux=U240、 Ux±60=U300;在第5扇区,Ux=U0、Ux±60=U300。七段式SVPWM的PWM波形如图3所示。
3.2 闭环控制结构设计
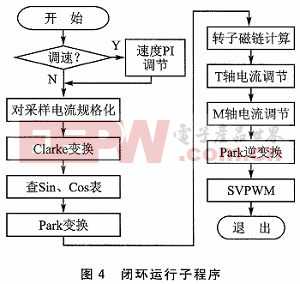
闭环子程序用来完成矢量双闭环控制程序流程如图4所示。
4 实验研究
实验用的是YS-7124系列鼠笼式三相交流异步电动机,其中功率为370 W,额定电流为1.94/1.12 A,额定电压为220/380V,额定频率为50Hz,额定转速为1400r/min,效率为69.5%,功率因数为0.72,堵转转矩/额定转矩为2.4,堵转电流/额定电流为6,最大转矩/额定转矩为2.4。
4.1 开环实验
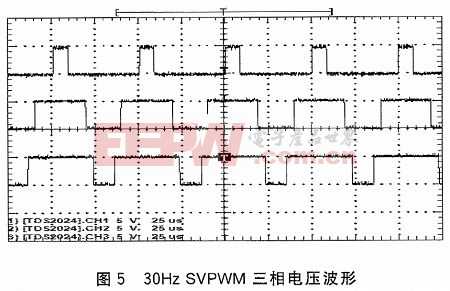
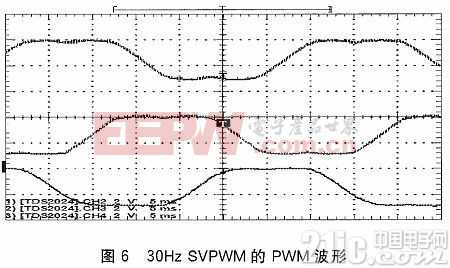
从图5和图6中可以看出,每两相电压的相位差是120°。从表1中可以看出,电机从2Hz开始转动,在10Hz以后速度接近理论值,在达到额定频率时转速略高于额定转速1400r /min。电机在低频下运行不稳定的原因在于频率较低时,电压下降过大,造成临界转矩下降。与硬件设备相同的(本试验设备),调制度为1时的5 Hz开始转动的SPWM控制相比,前者的电压利用率要高。对于角接三相异步电机,驱动电源外接220 V交流电,当SPWM调制度为1时,相电压的有效值最大为110V,角接相电压等于线电压。实际测得SVPWM在50 Hz下的电压是120 V。SVPWM的电压利用率比SPWM高,调速范围宽,证明矢量控制采用SVPWM技术具有优越性。

电机的速度在25个PWM周期(2.5 ms)调节一次,启动运行时间大约为0.6 s(可根据要求调整),实验图形表明:上升时间tr大约在0.11 s,峰值时间tp在0.6 s左右,超调量Mp大约为12%,有3次振荡,调整时间ts为0.84 s左右,在1000 r/min稳定时最大误差为1.5%。
4. 2 闭环实验
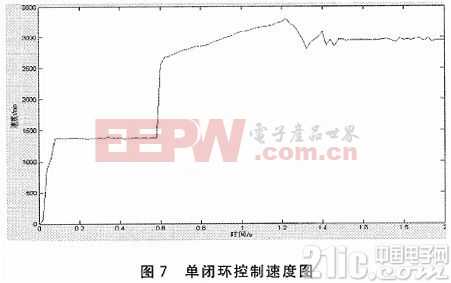
单闭环控制速度图如图7所示,矢量控制转速图形如图8所示。
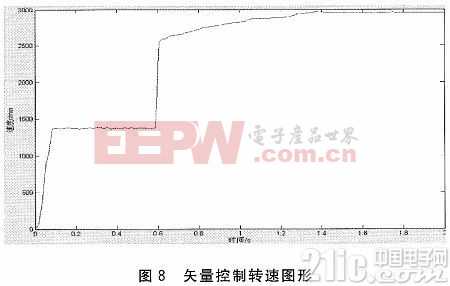
从矢量的实验现象可以看出,电机在空载的条件下,调速范围较宽,能达到50~1400 r/min,系统能够快速、稳定地达到设定值,整个系统能很好地实现电机的正转、停止、反转等功能。
可以看出,矢量控制双闭环的速度波动比启动运行时的电机速度波动要小,而且在同一PI调节参数下,速度调节要比单闭环更平稳。
电机的速度在25个PWM周期(2.5 ms)调节一次,启动运行时间大约为0.6 s(可根据要求调整),上升时间tr大约在0.3 s,峰值时间tp在0.8 s左右,超调量Mp非常小,大约为0.1%,几乎无振荡,调整时间ts为0.84 s左右,电流变化也较小,并且稳定后接近正弦波形,矢量控制电机运行非常稳定,因编码器干扰等原因速度值存在2%以下的误差(50~1400 r/min)。对比单纯的SVPWM开环控制在1000 r/min的误差2%,单闭环的1.5%,矢量双闭环控制系统在1000 r/min时,实际最大误差仅为0.8%,而且双闭环的超调量要远远小于单闭环,且无振荡。dsPIC30F6010指令多为单周期指令,所以运行速度也快,从而可以看出本控制系统的优越性。
结语
通过研究,验证了dsPIC30F6010应用在电机控制上的可靠性和优越性,找到了一种适用于三相交流异步电动机全数字、高性能的通用方法。从实验结果可以看出,这种基于dsPIC30F6010的三相交流异步电动机的控制系统在交流调速和制作变频器方面具有一定参考价值。
评论