一种基于OpenWrt操作系统的移动机器人设计方案


方案概述
本系统选用的OpenWrt操作系统,该系统适合移动机器人的设计要求,系统提供的软件包简化了系统开发流程,提高了开发效率。经过实际调试运行,系统完全可以达到设计要求,可以用于探测险情、图像采集、目标定位、无线通信等领域。功能定义及性能指标
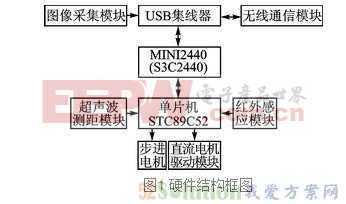
采用2层架构,上层以ARM处理器S3C2440为核心,选用MINI2440开发板作为上层的主板,负责图像采集,并将图像通过Wi-Fi方式发送给远端的PC机。Wi-Fi无线通信是利用PC机与无线路由器搭建环境平台共同实现的。方案优势
机器人主要由硬件系统和软件系统构成。硬件系统主要包括:ARM处理器、单片机、外围接口电路、机 器人底盘以及电源等。其中ARM处理器是上层的核心,51单片机是下层的核心。
软件包括:嵌入式Linux操作系统、外设驱动程序、Linux应用程序以 及单片机应用程序等。系统没有选用通常的嵌入式Linux版本,而是另辟蹊径,选用一种独特的嵌入式Linux发行版之一OpenWrt作为操作系统。 OpenWrt提供了一个完全可写的文件系统及软件包管理,它通过简单易用的方式,降低了嵌入式Linux开发的门槛,提高了系统软件开发的效率。
原理及实物图
评论