四轴飞行器设计方案


方案概述
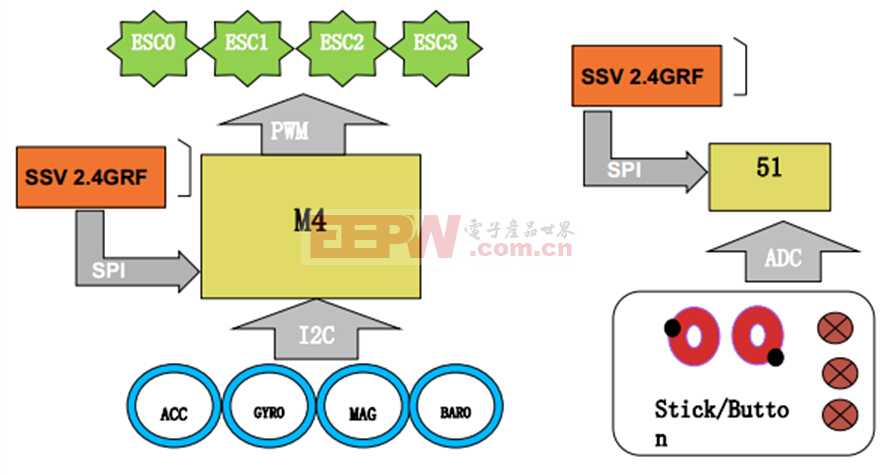
本方案采用新唐 32 bit Cortex-M4 M452 微控器,支持失控保护(自动降落),通过控制电调达到飞行目的,同时通过2.4G专用遥控模块与遥控把手通信。M452强大的运算能力,将10轴传感器运算结果整合,确保飞行的稳定性。
功能定义及性能指标
主控采用新唐M452,连接 GPS , 2.4G RF , 9 轴传感器 , 压力感应器 , 红外传感器 , 超声波传感器
手把控制采用新唐8051 N79E814控制飞行器飞行姿态
控制手把与主控端通过SSV 2.4G 射频通信
电调部分采用MINI54系列
空旷地带控制距离可达100米
方案优势
①支持高速 ESC(400Hz)
②支持低电池侦测
③支持飞行动态 PID 调适
④SSV 2.4G 射频
⑤空旷地带控制距离可达100米
⑥支持传感器校准,陀螺仪增稳
原理及实物图
评论