
基于TMS320F2812的视频图像采集系统的设计

快速发展的汽车产业为车载电子产品提供了广阔的应用市场,如车载的“红外监视”、“倒车雷达”等视频监视设备,为驾驶员既带来了方便,也带来了安全。
这些监视设备离不开视频图像采集,而视频图像采集的关键环节就是视频信号的AD转换。传统的视频图像采集系统一般采用专门的图像采集芯片,如SAA7110视频解码芯片,自动完成图像的采集;缺点是电路复杂、成本高,不方便对其进行软件编程和升级,进而其采集图像的精度和速度也受到制约,对非标准视频信号适应性不好。
本设计采用DSP的片上ADC实现图像采集,不需要专业的视频解码芯片,虽然不能完成图像的自动采集,但是具有电路简单、成本低、易于维护和升级的特点。更重要的是可以对其进行软件编程,以适应不同标准视频信号的采集。用DSP和CPLD搭建数据采集系统时,不必外接专业的图像采集芯片,避免了复杂的硬件设计,同时提供了足够的处理能力。本设计采用TI公司的TMS320F2812芯片采集图像,并搭建TMS320C6416t处理图像,实现了基于DSP的视频图像采集。
视频图像采集的系统方案
视频图像采集包括视频预处理电路和A/D转换电路,其结构框图如图1所示。
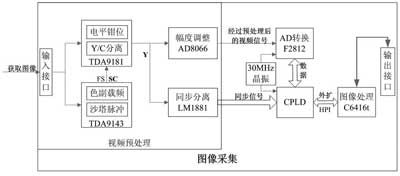
首先对获取的图像信号进行同步信号分离,将分离出来的同步信号连接至CPLD。视频信号在经过电平钳位、幅度调整等预处理后,将其连接到F2812的ADC输入端。
F2812通过XINTF将其片上ADC的结果输出至CPLD,CPLD根据分离出的同步信号的时序关系将视频亮度信号通过HPI传输给图像处理器C6416t进行图像处理。其中,本文主要设计的是前端图像采集部分,用户可以根据自己的需要更换图像处理器,以满足不同的图像处理要求。
1 视频预处理
模拟视频信号中包含有视频亮度信号、视频色度信号、视频同步信号。视频信号的峰峰值为1V,并且其同步信号电平低于零电平。而F2812采用的ADC量程为0~3V,因此在视频转换之前,需要对其进行Y/C分离、同步分离、电平钳位、幅度放大等预处理。
①Y/C分离和电平钳位
本系统采用飞利浦公司的TDA9181和TDA9143芯片进行Y/C分离。TDA9181是多标准动态梳状滤波器,由延时、加法器、减法器、带通滤波器组成,支持PAL B、G、H、D、I、M、N 及NTSC M标准的梳整,可以为其相关制式的视频信号进行Y/C分离。TDA9181还能对输入的信号进行电平钳位。
TDA9143是一种由I2C总线控制的PAL/NTSC/SECAM解码器,可以为TDA9181提供Y/C分离所需要的沙堡脉冲信号和色副载频信号。
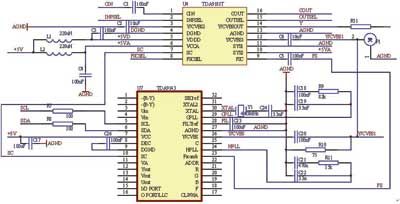
图2 Y/C分离原理图

图3 AD8066视频缓冲器原理图
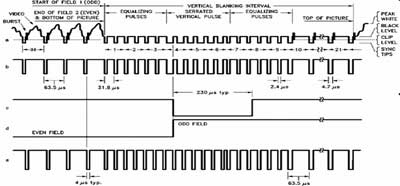
图4 同步分离
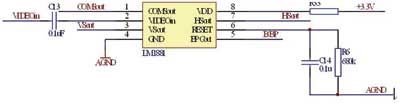
图5 LM1881分离原理图
TDA9181和TDA9143接口原理图如图2所示。
②视频缓冲器
由于视频信号的峰峰值为1V,而F2812的ADC量程为0~3V,所以为了更好的进行视频采样,需要对视频信号放大3倍。
系统采用的AD8066是高压、高速、低功耗和大电流的轨对轨输出的单路和双路运算放大器,其微分增益误差和微分相位误差分别为0.01% 和0.02%,7MHz带宽的增益均匀性为0.1dB,非常适合视频缓冲应用。
AD8066用作视频缓冲器的原理图如图3所示。
③同步分离
同步分离采用NS公司的LM1881芯片。LM1881能够从峰峰值为0.5~2V的PAL、NTSC和SECAM视频信号分离出各种同步信号,如图4所示 (a:复合视频信号,b:复合同步信号,c:场同步信号,d:奇偶场信号,e:突发/后肩信号)。此外,LM1881还可应用于非标准视频信号的同步分离,原理如图5所示。
2 视频A/D转换器
TMS320F2812为32位定点可编程处理器芯片,最高频率为150MHz,可以方便地与其他处理器连接,片上12位ADC最高采样带宽可达12.5MHz,拥有相当于16级的FIFO,使片上ADC能达到上限工作速率,实现每80ns采集1个数据。此外,TMS320F2812可以方便的进行软件编程,以适应不同标准的视频信号,故采用F2812用作AD转换。
采用级联、连续自动排序模式工作流程图如图6所示。

图6 AD转换工作流程图
3 视频图像处理
本系统设计了用CPLD外扩TMS320C6416t处理图像,用户可以根据自己的需要更换图像处理器,以达到需要的处理效果。
图像采集
1 采集流程
① 将摄像机输出的PAL/NTSC制式的模拟视频信号通过TDA9181和TDA9143进行Y/C分离和电平钳位后,一路给TMS320F2812变成数字信号,另一路给LM1881分离出同步信号。
② 将F2812采集后的图像数据通过其XINTF传输至CPLD;将LM1881分离出奇偶场信号和复合同步信号也交给CPLD进行逻辑控制。
③ 由CPLD根据奇偶场信号和复合同步信号来决定是采集奇场图像还是偶场图像,或者采集一帧完整的图像。(用户也可以用自己外扩的图像处理器来判断图像的帧数。)
2 行、场处理
①当场同步信号到来时,CPLD根据奇偶场信号决定是采集奇场图像还是偶场图像,或者采集一帧完整的图像;当复合同步信号到来时,CPLD判断是哪一行。CPLD会根据这些逻辑时序来控制F2812的采集,以及提供同步时序给外扩的图像处理器。
②用户也可以根据自己的需要处理这些同步信号,比如用外扩的图像处理器代替CPLD来判断图像的行、场。
系统性能
只有AD采集的速度和精度达到视频图像变化的要求,才能对视频图像进行实时的采集。标准PAL制式模拟视频信号的每场扫描行数为625行,每帧实际传送图像为575行,场频50Hz,帧频为每秒25帧,每秒钟信号的变化频率是5.52MHz,即图像信号带宽为5.52MHz,根据抽样定理AD采样的带宽至少是11MHz;而TMS320F2812片内的AD转换器最高采样带宽可达12.5MHz,因此在速度方面完全满足采集视频信号的要求。同样的,F2812的视频AD转换精度为12比特,用户也可以对F2812的ADC模块进行编写校正算法,来不断的提高ADC的转换精度。
应用
本系统平台可用于多种制式的视频图像采集和数据参数采集,可以制作成视频采集卡和数据采集卡。视频采集卡可用于车载的视频监视,如目标识别和倒车雷达。
在视频采集卡的输入端接红外图像传感器,输出接口接显示设备,就可以用于夜间红外监视。用户可以方便的对图像处理器(如C6416t)进行软件编程,用于目标获取和识别。例如,汽车在夜间行驶时,当前面有不明障碍物,红外监视器就会提前发出警报并在监视器上显示目标来提醒驾驶员。
在视频采集卡的输入端接普通的光电摄像头,可以用于倒车视频监视。这样驾驶员就不必转身扭头倒车了,只需要看着旁边的视频监视器就可以方便的倒车。
本系统平台也可以用于多种数据参数的采集,在视频采集卡的输入端接不同的数据传感器,就可以用于工业自动化和汽车的数据参数监视。例如,汽车的轮胎气压是否正常、车内的空气质量是否达标、行驶的速度是否过快、水温是否过高,以及剩余的油量是否过少等,都可以通过对数据参数的采集后,来提醒驾驶员。
结束语
本系统不需要专门的ADC芯片,单片DSP就能实现视频图像、数据采集;并且可以方便对F2812进行软件编程来不断提高图像、数据的采集质量;另外CPLD提供了丰富的外扩接口,用户可以很容易的更换自己的图像处理器,为以后的图像数据处理提供了方便。
评论