
电子捕鱼虾机电路图二

电路工作原理
该电子捕鱼虾机电路由无稳态振荡器、逆变器电路和高压输出电路组成,如图20所示。
无稳态振荡器电路由时基集成电路IC、电阻器R3、R4、电位器RP2、二极管VD4、VD5和电容器C4、C5组成。
逆变器电路由晶体管V1、V2、变压器T1、T2、电阻器R1、电位器RP1、二极管VD3和电容器C3组成。
高压输出电路由变压器T2、继电器K、二极管VD1、VD2、VD6、电阻器R2、电容器C1、C2、氖指示灯HL和电极A、B组成。
接通电源开关后,12V直流电压经RP1、C3、VD3和T1为V1提供起动脉冲,使V1先触发导通,然后V1和V2在T1、R1和”一次绕组(W4、W5绕组)的反馈作用下,很快进入交替导通与截止的推挽振荡状态,T2的二次绕组(W6绕组)两端产生220V左右的交流电压,此电压经VD1、VD2和C1、C2倍压整流变为400V左右的直流电压,通过继电器K的常开触头加在电极A(带捞网)和电极B上。
与此同时,无稳态振荡器振荡工作后,从IC的3脚输出占空比可调的控制电压,使K间歇通电工作,在电极A与电极B之间将产生断续的直流高压。
使用时,手持连接电极A和电极B的竹竿(应注意人身安全),将电极A和电极B相距3m左右放人水中,在两电极之间水域中的鱼、虾将受到电击,以方便捕捞。
调节RP1的阻值,可改变逆变器电路的振荡频率。
改变RP2的阻值,可改变无稳态振荡器振荡信号的占空比,从而改变K的吸合与释放工作频率。
逆变器振荡工作后,氖指示灯HL点亮。
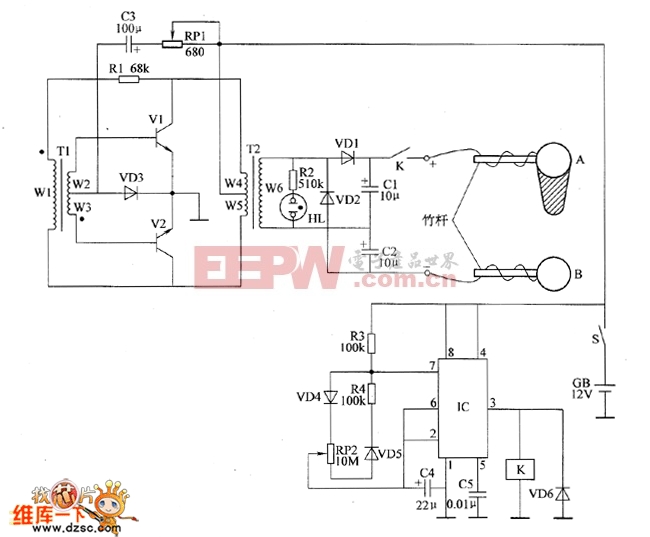
图 电子捕鱼虾机电路
元器件选择
R1选用8~1OW的线绕电阻器;R2~R4均选用1/4W金属膜电阻器。
RP1选用2\7合成膜电位器;RP2选用小型有机实心电位器。
C1和C2均选用耐压值为630V的铝电解电容器;C3选用耐压值为3001/以上的铝电解电容器;C4选用耐压值为16V的铝电解电容器;C5选用独石电容器。
VD1和VD2均选用1N5408型硅整流二极管;VD5和VD6均选用1N4007型硅整流二极管;VD3和VD4均选用1N4148型硅开关二极管。
V1和V2选用MJ10016或BU932、MJ10025型硅NPN大林顿晶体管。
K选用JTX系列12V直流继电器(两组常开触头并联使用)。
S选用触头电流负荷为10A以上的电源开关。
T1使用E12型磁心和高强度漆包线制作:W1绕组用Φ0.31mm的漆包线绕200匝,W2绕组和W3绕组用Φ0.62mm的漆包线各绕40匝;T2使用40mm×40mm的E型铁心和高强度漆包线制作,W4和W5绕组用Φ1.8mm的漆包线各绕16匝,W6绕组用Φ0.8mm的漆包线绕150匝左右。
GB选用12V、60A・h的铅酸蓄电池。

评论