可穿戴型下肢助力机器人感知系统传感电路图


电路说明: 电路由检测电路、信号放大电路和稳压电源电路组成。其中检测电路由电阻RH、晶体管VT以及电阻R1、R2组成;信号放大电路由A1、RP1、RP2、 R3、R4、R6、R5、R8、VD3组成;稳压电源电路由VD1、VD2、R7、R9、R10、R11组成,为检测电路提供2.5V的稳压电源。而电阻 RH可以采用硅电阻,因为硅在25摄氏度时响应时间小于5S。其中电路中采用了两个TL431,TL431是一个有良好的热稳定性能的三端可调分流基准源。它的输出电压用两个电阻就可以任意地设置到从2.5V到36V范围内的任何值。该器件的典型动态阻抗为0.2Ω,在很多应用中可以用它代替齐纳二极管,例如,数字电压表,运放电路、可调压电源,开关电源等等。 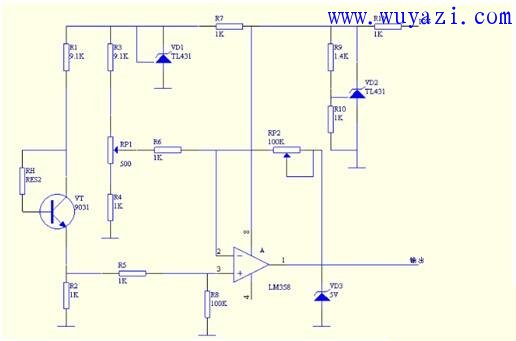
电路原理:当传感器穿戴身上时,由于温度不同,使得传感器的RH阻值也不同,这个电阻成为VT的基极偏流电阻。偏流电阻的不同,使基级的电流也不同,从而改变了VT 的集电极电流,也就改变了VT发射极电流,发射极的电流流经 R2,在R2上将发射极电流转换成电压,并将该电压送到A1的同相输入端,经A1放大后输出,并由VD3控制输出电压,使得输出电压在5V以内。
评论