变频器低频特性分析及改善措施


1 概述
由变频器构成的交流调速系统普遍存在的问题是:
1)系统运行在低频区域时,其性能不够理想,主要表现在低频启动时启动转矩小,造成系统启动困难甚至无法启动;
2)由于变频器的非线性产生的高次谐波,引起电动机的转矩脉动及电动机发热,并且电动机运行噪声也加大;
3)低频稳态运行时,受电网电压波动或系统负载的变化及变频器输出电压波形的畸变,将造成电动机的抖动;
4)当变频器距电动机距离较远时,以及高次谐波对控制电路的干扰,极易引起电动机的爬行。
由于上述各种现象,严重降低由变频器构成的调速系统的调速特性和动态品质指标,本文对系统的低频机械特性和变频器的低频特性进行分析,提出采取的相应措施,以使系统的低频运行特性得以改善。
2 变频器低频机械特性
2.1 低频启动特性
改变异步电动机定子频率f1,即可平滑地调节电动机的同步转速,但是随着f1 的变化,电动机的机械特性也将发生改变,尤其是在低频区域,根据异步电动机的最大转矩公式
2.2 低频稳态特性
电动机稳态运行时的转矩公式如下。
在角频率棕1为额定值时,R1可以忽略,而在低频时,R1已不能忽略,故在低频区时由于R1上的压降所占的比重增加,将无法维持电磁转矩的恒定,特别是在电网电压变化和负载变化时,系统将出现抖动和爬行。
3 变频器调速系统低频特性
3.1 谐波分析
由变频器构成的调速系统,由于变频器的非线性,电动机定子中除了基波电流外,还有各次谐波电流,由于高次谐波的存在,使电动机损耗和感抗增大,减少了cos渍,从而影响输出转矩,并将产生6倍于基波频率的脉动转矩。
以电流波形中的5 次、7 次谐波来分析,在三相电动机定子电流中的5 次谐波频率为f5=5f1(f1为基波电流频率),它在电动机气隙中产生空间负序的磁势和磁场,这个磁场的转速n51 为基波电流所产生磁场的转速n11 的5 倍,并且沿着与基波磁场相反的方向旋转,由于电动机转速一定,并假设接近n11,这样由5 次谐波磁势在转子内感应出6倍于基波频率的转子电流,此电流与气隙基波磁势的合成作用产生6 倍于基波频率的脉动转矩。
7次谐波所产生的磁场与基波同相序,但它所产生的旋转磁场转速7 倍于基波旋转磁场的转速,故相应转子电流谐波与气隙主磁场的相对转速也是6 倍于基波频率,也产生一个6 倍于基波频率的脉动转矩。
以上两个6 倍于基波频率的脉动转矩一起使电动机的电磁转矩发生脉动,虽然其平均值为零,但脉动转矩使电动机转速不均匀,在低频运行时影响最大。
3.2 准方波方式下脉动转矩的产生
分别设鬃1、鬃2为定子磁链及转子磁链的空间矢量,在稳态准方波(QSW)运行方式时(桥中晶闸管用180毅电角脉冲触发),鬃1 在输出周期内沿着正六边形的周边运动,鬃2 沿着与六边形同心的圆周运动。在准方波运行方式下鬃1和鬃2运动是连续的,但它们有重大的区别,当矢量鬃2以恒定定子电压角速度棕1 旋转时,矢量鬃1以恒定的线速度沿正六边形周边运行,矢量鬃1 线速度恒定导致其角速度的变化,进而引起鬃1和鬃2的夹角啄变化,除此,当鬃1 沿着六角形轨迹移动时其幅值在一定程度上也有变化。当电动机空载时,由于处于稳态鬃1与鬃2的夹角啄与转矩T在棕1t=0、仔/6、仔/3时为零,而当棕1t屹0、仔/6、仔/3 时,啄不为零,它与上面提到的鬃1幅值变化一起引起低频转矩脉动,其频率为定子电压基波的6倍,当电动机带负载时对应于一个恒定的啄均值,低频转矩脉动将叠加于恒定转矩均值之上。
4 系统低频特性改善措施
4.1 启动转矩的提升
由于系统在低频时受R1上的压降影响,使系统的启动转矩随棕1 下降而减小,为此变频器设有转矩提升功能,该功能可以调整低频区域电动机的力矩,使之与负荷配合,增大启动转矩。可选择自动转矩提升或手动转矩提升模式,其原理是提升定子电压也就相应提高了启动转矩,但提升电压设置过高,将导致电流过大引起电动机饱和、过热或过电流跳闸。如1336PLUS系列变频器的转矩提升功能,可自动调整提升电压,以产生所需的电压,可根据预定转矩所需的电流来选择提升电压,转矩提升在控制电流的同时使电动机处于最佳运行状态,在选择手动转矩提升时,要结合实际情况来设定转矩提升值。
4.2 改善低频转矩脉动
变频器构成的交流调速系统的低频转矩脉动直接影响系统动态特性,不论是变频器的生产厂家,还是系统集成的工程技术人员,都在致力于改善低频区脉动这一技术问题。如采用磁通控制方式,它不是按照调制正弦波和载波的交点来控制开关器件GTR 的导通和关断,而是始终使异步电动机的磁通接近正弦波,旋转磁场的轨迹是圆形,以此来决定GTR的导通规律。在很低的频率下,保证异步电动机在低速时旋转均匀,从而扩大了变频调速范围,抑制异步电动机的振动和噪声。其圆形旋转磁场的实现,是通过检测磁通使控制环节随时判断实际磁通是否超过误差范围,来改变GTR的工作模式,从而保证旋转磁场的轨迹呈圆形,以减少转矩脉动。
4.3 圆周PWM方法降低转矩脉动
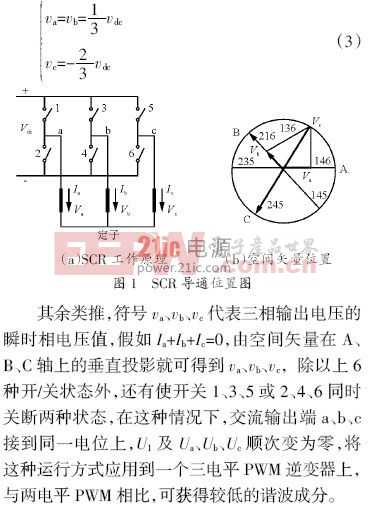
“圆周”的含义是指定子磁链空间矢量鬃1 在高斯平面中沿着一个非常接近于圆周的多边形运动,其以降低电动机脉动转矩为目的来确定电压脉冲的宽度和位置。三相逆变器为全波桥式结构,如其运行在这样一种方式下,当交流输出端(a、b、c)之一在任何时刻接通直流母线(+、-)之一时,剩下的两个交流输出端,应同时接到另一个直流母线上,这一原理从图1(a)中可以明显表示清楚。显然交流输出端接到直流母线方式有6 种,这就导致定子电压U1的空间矢量有6 个位置,这6 个位置如图1(b)所示,图1(b)中6 种开/关状态对应着U1的六种位置,图中粗线位置表示开关1、3、6处于开的位置,投影所产生的瞬时相电压为
PWM 形式是一种斩波准方波调制,负载上的相电压由矩形段和零电压段(U1=0 时)组成,在每个电压脉冲时刻,矢量鬃1 以恒定线速度移动,而在零电压段保持静止,然而由于矢量鬃2 以恒定角速度棕1转动,鬃1 和鬃2间的夹角啄就出现了,因此电压斩波是引起高频转矩脉动的主要原因,其频率与输出电压脉冲频率相同。这是PWM 自身所固有的,实际上高频转矩脉动是很难消除的,它总是叠加于低频转矩脉动之上。为消除系统的低频转矩脉动可从以下两种方式开展工作。
在电压脉冲中间点的时刻,矢量鬃1、鬃2间的夹角啄在稳态运行时对于所有脉冲应保持恒定,消除由啄变化而产生的对低频转矩(频率为6f1)的影响,在空载情况下啄=0,尽管鬃1 的幅值变化,低频转矩脉动仍然将被完全消除。
在恒定负载时,仅仅鬃1幅值的变化就会引起低频转矩脉动,而负载引起鬃2幅值的变化可以忽略,因此必须获得一个比较接近于圆周的鬃1矢量轨迹。
圆周PWM 是利用空载矢量鬃1的空间位置来确定电压脉冲的中间点,即晶闸管导通段及零电压段的合理组合,可以产生幅值变化可忽略不计的鬃1,此原理如图1所示,鬃1停止时刻(即零电压段)用黑线标出,确定电压脉冲位置使它们对称,如图中A、B、C 各横坐标(即B、C 旋转后)的中间点,脉冲宽度(即持续时间)与坐标长度相对应,所要求的输出电压波形周期由矢量鬃1沿多边形转一周所需的时间确定。采用此方法在保持输出电压由零到最大值可变的同时,可有效地消除低频转矩脉动。
评论