高可靠性CAN-bus以太网冗余组网方案


简单工业网络冗余
我们以一个已经在实际中应用的组网方式为例。组网方式如图 1所示。
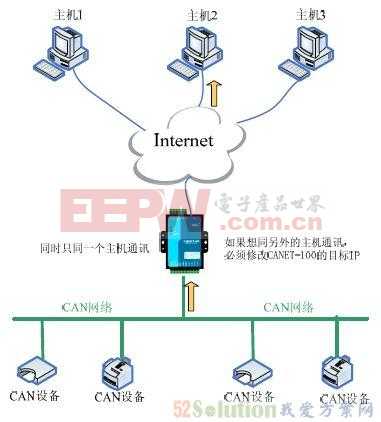
图 1 CAN-100同多个目标主机通讯
这是一个分布式CAN网络采集和控制系统,CANET-100将CAN网络中CAN设备同远端的控制主机连接起来,使得以太网上的主机能灵活的监视和控制各个CAN设备。为了能提高整个系统的可靠性和稳当性,这里使用了三台主机作为服务器,其中一台为工作服务器,另外两台为冗余服务器。
正常情况下,只是当前工作的服务器负责对各个CAN设备进行监控,其它两台冗余服务器和CAN设备之间没有通讯。
一旦当前工作的服务器出现故障不能正常工作时,两台冗余服务器中的一台就由冗余状态变成工作状态,接替出现故障的服务器对CAN设备进行监控。同样如果当前服务器又出现故障不能正常工作,剩下的冗余服务器就变成工作服务器,继续对各个CAN设备进行监控。
会出现的问题
这种应用方案在一般的情况下的确可以很大提高系统的可靠性和稳定性,但是在一些异常情况下,可能就不能达到其预期设计的效果。在公司产品的应用中,我们发现了以下的问题。
因为某些转换设备(如CANET-100)同时只能同一台服务器通讯,当出现冗余服务器变成工作服务器时,为了能继续和CAN网络转换器通讯,工作服务器必须改写CANET-100的目标IP,使其和服务器自己的IP相同。而所有的目标IP等工作参数都是存放在片外的E2PROM里。
一般E2PROM芯片大概只能进行一百万次的写入。一百万次看起来好像足够大,但是在服务器的工作出现异常时(例如:判断工作服务器是否正常工作时出现混乱),可能就会出现反复读写E2PROM的情况,一百万次的读写对于服务器来说太轻松了,随之E2PROM芯片就会出现损坏,导致整个系统不能正常工作,虽然在网络上做了冗余,但是问题出在转换设备上,再多的冗余主机也无济于事。
评论