一种嵌入式可视倒车装置的设计


引言
目前,我国普遍采用的倒车装置是超声波倒车雷达,这种装置虽能准确测量车尾与车后障碍物的距离,但由于存在视觉盲区,司机无法判断障碍物的确切位置,更不能感知地坑或低矮障碍物。国内外研究趋势是在倒车雷达的基础上采用数字图像处理技术,利用强大的嵌入式处理器,开发用于检测车后物距和监视车后图像的优点相结合的车载可视倒车装置。这类新型装置的价格较高,目前仅在中高档轿车上使用。为此,提出了基于IntelPXA270硬件平台及嵌入式WindowsCE操作系统的车载可视倒车装置。
1 系统结构
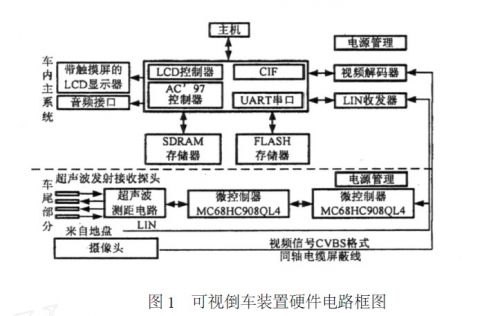
本文提出的可视倒车装置硬件电路框图如图1所示,主要由Intel嵌入式处理器PXA270、视频采集、超声波测距等电路组成。两对超声波换能器、信号调理电路和微控制器完成对障碍物的距离测定,并通过LIN总线发送至车内主系统;摄像头采集到的视频复合信号通过同轴电缆送至视频解码芯片进行A/D转换,并产生YUV422格式的视频信号输入PXA270的快速捕捉摄像头接口;主系统处理器利用字符叠加技术,在TFTLCD屏上将含有障碍物距离等参数的图像信号播放出来。
1.1 嵌入式处理器PXA270
本系统所采用的嵌入式处理器PXA270其最高主频达624MHz,加入了WirelessMMXTM技术,从而提升了多媒体处理能力,同时还加入了IntelSpeedStep动态电源管理技术,在保证CPU性能的情况下,最大限度地降低移动设备功耗;并拥有丰富的外部接口:如AC’97控制器、LCD控制器、CIF接口、SD卡接口等。
1.2 视频采集电路
车内主处理器PXA270的CIF接口只能处理数字信号,因此必须先将摄像头采集到的模拟信号进行转换。本系统的视频输入解码模块使用TI公司的视频解码芯片TVP5150及外围电路构建,其主要功能是将每一路CCD摄像头采集的标准PAL制电视模拟信号发送至视频解码器,完成视频图像的箝位及抗混叠滤波等预处理、模拟视频信号到数字YUV4:2:2的转换及亮度/色度、水平/垂直同步等信号的分离。解码芯片和PXA270通过CIF接口连接,PXA270通过I2C总线访问TVP5150的内部寄存器,协调处理器与解码器之间的工作交流。
1.3 超声波测距电路
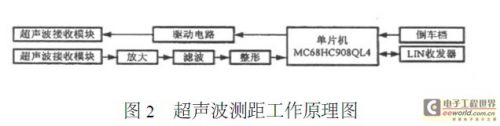
测距电路主要由超声波发射电路和接收电路组成,原理框图如图2所示。该模块单片机选用Freescale公司的MC68HC908QL4,该芯片可靠性高、抗干扰能力强,内含4kB闪速存储器,四通道10位A/D转换器,并集成了LIN控制器。超声波探测车物之间的距离,并将数据经LIN总线传送至车内主处理器。由于超声波测距只在汽车倒车时为驾驶员提供车后信息,而倒车时车速较慢,与声速相比可认为是静止的,因此采用脉冲测距法,只测量超声波在测量点与目标间的往返时间计算距离较简单。
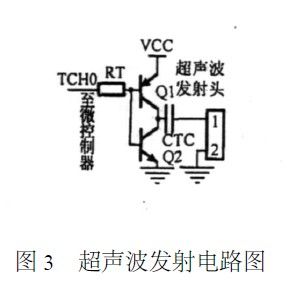
(1)超声波发射电路超声波发射电路如图3所示。当汽车驾驶员手柄转到倒车档时,测距电路开始工作,微控制器发出40kHz方波信号,经驱动电路放大后,通过探头发射出去,此时计数器开始计数。
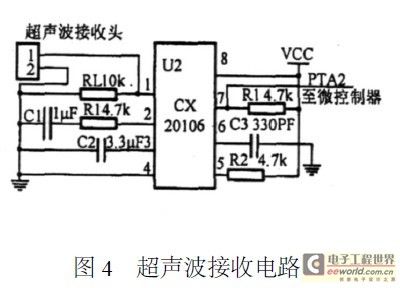
(2)超声波接收电路超声波接收电路如图4所示。采用专用前置放大器CX20106,由前置放大器、限幅放大器、带通滤波器、检波器、积分器、整型电路组成。其中,前置放大器具有自动增益控制功能。超声波信号在空气中传播遇到障碍物后发生反射,回波经接收探头接收并转换成电信号,经条理电缆,输入到微控制器的外部中断口,使计数器停止计数,从而计算出障碍物的距离。
1.4 LIN总线收发器接口电路设计
LIN是一种低成本的串行通讯网络,用于实现汽车中的分布式电子系统控制,是一种辅助的总线网络,在不需要CAN总线的带宽和速度的场合可大大节省成本。LIN通讯是基于SCI异步串行通信的数据格式,采用单主控制器/多从设备的模式,仅使用一根12V信号总线和一个无固定时间基准的节点同步时钟线。TJA1020是常用的LIN主/从协议控制器和LIN总线的物理接口芯片,接口电路如图5所示。

2 软件设计
2.1 系统平台的定制
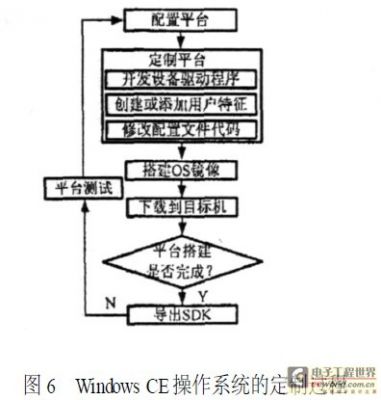
WindowsCE是微软专门为各种嵌入式系统设计的一种高效、可升级的操作系统,广泛用于各种嵌入式产品。为定制该装置的WindowsCE操作系统,首先根据硬件配置,在PlatformBuilder开发环境中导入Intel提供的BSP板级支持包,并开发自己的OEM硬件适配层、组件。操作系统映像建立成功后,再将平台传输到目标设备进行测试。最后输出软件开发工具包,在EVC++环境中开发应用程序。
WindowsCE定制过程如图6所示。
2.2 摄像头驱动程序设计
本文述及的驱动是在WindowsCE下实现的。摄像头驱动程序的主要任务是控制视频数据在硬件中流动,并为摄像头应用程序提供标准接口。为简化编程难度,考虑到CIF接口的工作方式比较独立,采用类型为流接口驱动的单片驱动程序模型:即为每一个流接口驱动创建一个包含驱动程序的入口点动态链接库,实现文件I/O和电源管理函数交给内核使用。
摄像头驱动程序的流程图如图7所示,其工作内容如下:
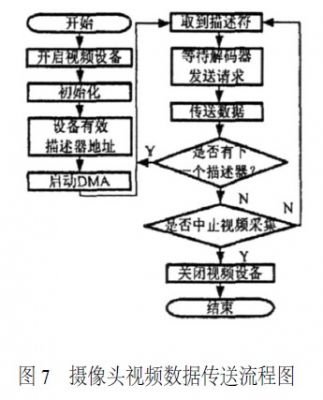
(1)负责通过I2C总线查询摄像头解码器的信息,调节摄像头解码器的设置;
(2)建立和控制DMA传输通道,通过DMA方式将CIF接口中的3个FIFO内的数据信息传送到内存中,从而实现快速高质量的数据传送;
(3)提供可以给应用程序使用的接口。
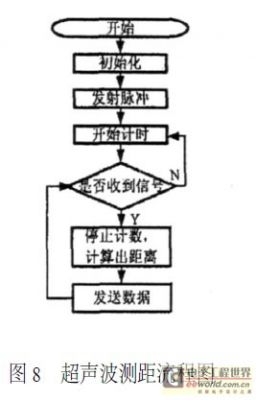
2.3 超声波测距软件设计
超声波测距软件主要包括测距及数据发送,其流程图如图8所示。
3 结果
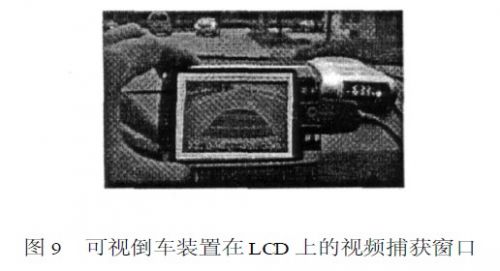
软硬件联合调试成功后,在实际车辆上进行了倒车试验。摄像头实际捕捉到的视频信号在LCD上的显示结果如图9所示。图9中数字为超声波测距数据。试验表明,该系统运行可靠,倒车时不但能清晰实时显示车后全景,而且还能准确测量汽车与车后障碍物之间的距离,基本达到了设计要求。
评论