油罐车的导航与监测系统系统


摘要
油罐车辆导航监测系统是集北斗(全球卫星定位系统(GPS))、地理信息系统(GIS)以及无线通信技术于一体的软、硬件综合系统。主要由三部分组成:监控中心软件系统、无线数据链路和GPS车载终端。可对移动车辆进行统一集中管理和实时监控调度指挥。GPS车辆管理调度系统利用电脑通过INTERNET,监控范围可以随着目标移动、放大、缩小,使目标始终保持在屏幕上,实现多窗口、多车辆、多屏幕同时追踪;北斗(GPS)满足了车辆的安全、快捷、准确的需求,提高了车辆服务能力、人员利用率、规范科学化管理水平及降低车辆的油耗、人员成本。
1、市场前景
油罐车的运输状况难以适时掌握,在一定程度上制约了企业经营效益的提高。燃油产品的安全运输在石油运输企业管理中一直是倍受关注的问题,在燃油产品的运输中,盗窃、抢劫以及员工的不规范行为给企业带来了不同程度的损失,而普通的计算机系统管理的信息化已经不能解决这个问题,拥有一套可对燃油运输车辆进行实时监控的移动定位系统成为石油运输企业管理中不可或缺的辅助手段。GPS与北斗技术的不断进步和发展给石油运输行业的储运管理提供了新的方式,北斗(GPS-全球定位系统技术)是目前进行目标观测,获取空间和地面信息,并对所获信息进行存储、处理、管理和应用的四大导航定位体系之一。通过北斗(GPS)技术,可以快速、准确、实时地确定空间位置的三维坐标,极大地缩短了信息源的更新周期。 北斗(GPS)监控系统的应用将会更大程度地降低成本,对石油运输企业优化资源配置、提高市场竞争力,将会起到积极的促进作用。
2、功能模块与分工
2.1、系统方案概要

2.2、车载模块概要
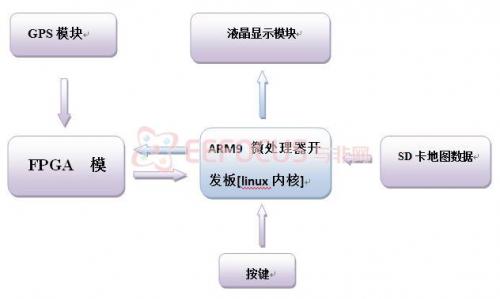
2.3、系统详细结构图

2.4、各模块功能与注释
|
序号 |
模块 |
型号/类型 |
功能或其它 |
|
A |
车载模块 |
|
车载硬件终端,有唯一ID识别码。具有导航、安全监控、GPRS通信、黑匣子等功能。 |
|
1 |
FPGA |
|
实现高速速数据转换和逻辑判断功能 |
|
2 |
ARM9嵌入式 |
ARM9/linux内核 |
实现状态跳转、FPGA指令控制中枢。 |
|
3 |
液晶显示屏 |
|
导航、紧急警告 |
|
4 |
GIS信息系统 |
MapInfo/MIF(MapInfo Interface Format) |
储存在SD卡内,地图信息可以拔出SD卡更新 |
|
5 |
SD卡 |
2G |
储存地图、车辆运行信息(黑匣子功能) |
|
6 |
紧急报警 |
开关 |
使用去抖和定时电路,要求连续按下500ms才有效,防止误报。 |
|
7 |
录音 |
|
驾驶室录音,记录进黑匣子 |
|
8 |
电子铅封专用加密控制模块 |
|
控制电子铅封开、关,以及开关状态监测,自带数据加密。 |
|
9 |
电子铅封 |
|
开启/关闭油罐,保证油品安全 |
|
10 |
GPRS模块 |
|
实现车载模块和监控中心的通信 |
|
11 |
发射天线 |
|
|
|
12 |
GPS模组 |
|
提供车辆车辆位置、方向、速度、时间等信息 |
|
13 |
时钟与计时器 |
4M有源晶振、其它由FPGA实现 |
记录车辆运行时间(是否疲劳驾驶)、与GPS时间自动校准的24小时时钟、提供系统全局4M时钟 |
|
14 |
EEPROM |
AT24C64A |
保存暂存数据、数据缓冲 |
|
B |
读卡模块 |
|
记录司机、任务信息,每次出发前通过USB接口写卡机写入 |
|
15 |
读卡机 |
|
车载部分,把司机信息写入系统 |
|
16 |
USB接口写卡机 |
|
通过电脑可以把数据写入到司机的卡中 |
|
17 |
非接触式IC卡 |
MF RC522 |
ISO 14443 TypeA和Mifare®通信协议 |
|
18 |
耦合线圈 |
|
配套在读写卡机和IC卡内,100mm读写距离 |
|
C |
电源模块 |
|
车载系统使用5VDC电源,电源从油罐车电瓶变压获得。 |
|
19 |
蓄电池 |
5VDC,4镍氢充电电池 |
|
|
20 |
变压器 |
|
|
|
21 |
车载电源 |
|
仅在车辆运行时才提供电能,停车后装置使用自带镍氢蓄电池 |
|
22 |
电瓶 |
|
油罐车电瓶 |
|
23 |
电瓶OC门 |
|
判断电瓶是否在发电,作降压作用。 |
|
D |
监控中心模块 |
|
使用帐号、密码登录的网页监控中心。不需要安装任何软件,联网即用。 |
|
24 |
网络公众端口 |
|
接收、发送GPRS信息的民用端口,直接连接到网络 |
|
25 |
民用网络 |
|
|
|
26 |
管理员电脑 |
|
|
|
27 |
网络服务器 |
|
租用网络服务器,接收GPRS通信,容纳监控中心后台 |
3、系统功能与实现方案
3.1、定位监控
系统建立起了车辆与系统用户之间迅速、准确、有效的信息传递通道。中心可以随时掌握车辆状态,迅速下达调度命令。同时,可以根据需要对车辆进行远程控制,还可以为车辆提供服务信息。
方案:
车载终端和监控中心之间使用GPRS通信,可以连续反馈/监控车辆信息,中心下达指令/信息通过GPRS可以显示在车载终端液晶显示屏上。
3.2、越界报警
出界报警:监控中心可以预设多个行驶区域,不允许油罐车辆超出,如果车辆超出行驶区域,北斗(GPS)车载终端将自动向中心上报越界报警。
入界报警:监控中心也可以预设多个禁止行驶的区域,不允许油罐车辆进入,如果车辆驶入该区域,北斗(GPS)车载终端将自动向中心上报入界报警。
方案:
出界入界报警通过监控中心的GIS和车辆GPS定位信息作判断,这样的优点是“界”的定义、更新比较方便,而且不会出现不同步更新的问题。
3.3、油罐开启报警
油罐车辆装满油后,驶离加油站,如果此时油罐车的出油口或进油口被打开,监控中心将收到油罐开启报警。或油罐车辆装满油后,车辆在加油站内,中心下发关闭电子铅封,如果此时油罐车的出油口或进油口再被打开,监控中心也将收到油罐开启报警。
方案:
油罐是否开启通过电子铅封判断,已经开启/关闭的信息直接发送到监控中心,由监控中心的GIS和车辆GPS定位信息作判断。
3. 4、紧急报警
当油罐车辆遇劫时,可触发隐蔽式的报警按钮向中心报警,总控中心在地图上将对该移动目标进行相应的色彩及图标的突出显示并以声、光报警提醒值班员注意,同时在屏幕上显示出该移动目标的用户资料,包括车辆信息(车辆编号、车牌号、车型、颜色、发动机号)、驾驶员信息(司机名、驾驶证号、行驶证号、联系电话)、联系方式(所属单位、负责人、电话)、车辆状态(车辆位置、方向、速度、时间)等信息,帮助值班员进行警情处理。能提供警情受理记录窗,供值班员记录受理情况。
方案:
紧急报警按钮使用去抖和定时电路,要求连续按下500ms才有效,防止误报。车辆信息由油罐车ID识别码提供、驾驶员信息和联系由非接触式卡
|
序号 |
信息 |
实现途径 |
|
1 |
车辆信息(车辆编号、车牌号、车型、颜色、发动机号) |
发送油罐车ID识别码,从控制中心数据库调出数据 |
|
2 |
驾驶员信息(司机名、驾驶证号、行驶证号、联系电话)、联系方式(所属单位、负责人、电话) |
非接触IC卡包含驾驶员信息,联系方式由监控中心数据库读取。 |
|
3 |
车辆状态(车辆位置、方向、速度、时间) |
位置、方向、速度、时间由GPS模组提供 |
3.5、 疲劳驾驶报警、超速报警
为确保行车安全,监控中心可以控制司机连续驾驶车辆的时间,如果司机连续驾驶超过监控中心限制的驾驶时间,车载终端将自动向中心发送一条疲劳驾驶报警,监控中心可以提示司机注意休息、注意行车安全。当油罐车辆超出监控中心设定的速度,GPS车载终端会向监控中心通报。
方案:
疲劳驾驶:判断发电机是否工作,发电机工作时电瓶发电,电瓶发电时,计时器1开始计时,当工作超过10小时则发送疲劳驾驶警告,计时器1清零的条件是:电瓶连续1小时工作(使用计时器2计算这1小时)。
超速报警:超速通过GPS速度判断达成。
3.6、车载设备检测功能
车载终端在网络覆盖的情况下,12小时至少向中心上报一次定位及状态信息。据此,中心可对车载终端的运行状况、故障信息进行统计。
方案:
每天0:00和12:00,额外向监控中心上报车辆信息。
3.7、 历史资料检索与历史轨迹回放
可随时查询某辆车的位置回报记录、某段时间接收的车辆位置回报信息、某段时间的受警记录等详细记录,并可选定某车某时间段的位置记录进行轨迹回放。
方案:
历史资料有2个保存途径:一是车载终端,使用SD卡记录信息(黑匣子),当GPRS网络没有覆盖或车辆出现被盗等情况时,仍有数据记录。二是在监控中心数据库的信息。
3.8、数据库管理及查询打印功能
建立各类数据系统,包括:用户数据管理系统、车载终端管理系统、协助单位管理系统、值班员管理系统、警情管理系统、录音管理系统等,并进行存储,可提供查询、回放、打印等功能。
方案:
通过网络服务器,监控中心数据库能提供查询、在线打印功能。
4、设计应用标准
《安全防范工程的程序与要求(GA/T75)》
《防盗报警中心控制台(GB/T16572)》
《入侵探测企通用技术GB10408.1》
《数字通信接口标准G.703》
《国际图像音视频编码标准(ISO11172)》
《安全防范系统验收规则GA308-2001》
《油罐车标准GB 20951-2007》
《欧洲防爆标准ATEX100a》
防爆安全方案:按照防爆认证的相关要求,终端的每个部分,包括传感单元,在安装完毕后都要用环氧树脂进行浇灌处理(使用E-44和低分子聚酰胺650)。按照防爆认证中的相关要求,外接线的供电线长期暴露在空气中,为避免短路造成影响,电源模块会对供电电压进行检测,一旦出现短路则切断外接线供电并发出报警声。
5、基于Spartan-6的高速数据转换收发控制FPGA模块
5.1、应用VHDL语言编写,其优点是:
①支持广泛、易于修改:由于VHDL已经成为IEEE标准所规范的硬件描述语言,目前大多数EDA工具几乎都支持VHDL,这为VHDL的进一步推广和广泛应用奠定了基础。在硬件电路设计过程中,主要的设计文件是用VHDL编写的源代码,因为VHDL易读和结构化,所以易于修改设计。
②强大的系统硬件描述能力:VHDL具有多层次的设计描述功能,既可以描述系统级电路,又可以描述门级电路。而描述既可以采用行为描述、寄存器传输描述或结构描述,也可以采用三者混合的混合级描述。另外,VHDL支持惯性延迟和传输延迟,还可以准确地建立硬件电路模型。VHDL支持预定义的和自定义的数据类型,给硬件描述带来较大的自由度,使设计人员能够方便地创建高层次的系统模型。
5.2、使用IEEE.STD_LOGIC_1164标准,代码简洁易懂,下面给出一个文件头。
LIBRARY IEEE;
USE IEEE.STD_LOGIC_1164.All;
USE IEEE.STD_LOGIC_UNSIGNED.ALL;
ENTITY segment0 IS
PORT (CLK : IN STD_LOGIC;
EN : IN STD_LOGIC;--Activity LOW
DIN : IN STD_LOGIC_VECTOR(15 DOWNTO 0);--BCD8421 code
NOTHING : IN STD_LOGIC;--Activity LOW
DOUT : OUT STD_LOGIC_VECTOR(6 DOWNTO 0);--A,B,C,D,E,F,G
DIG : OUT STD_LOGIC_VECTOR(3 DOWNTO 0));--one hot code
END segment0;
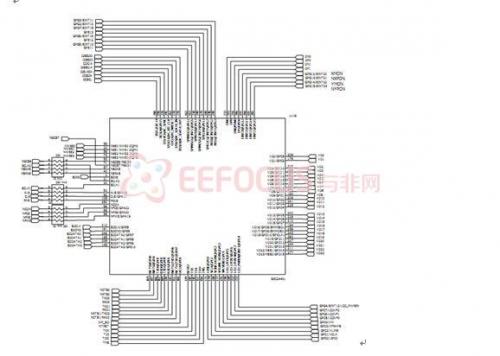
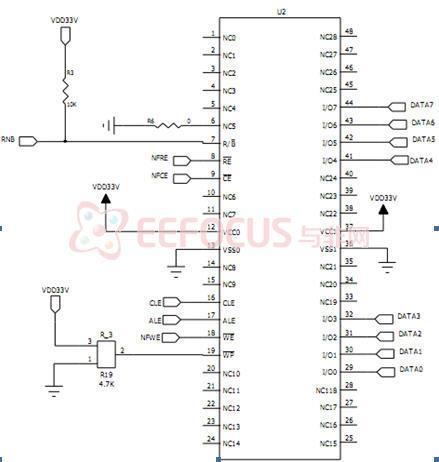
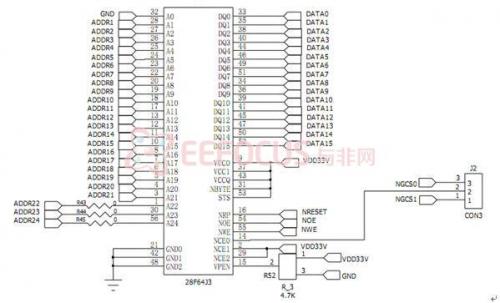
6、ARM9微处理器嵌入式图像处理和显示模块方案
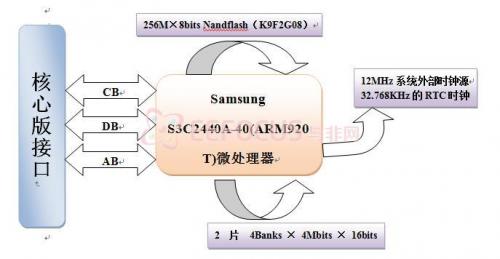
2440核心板模块框图
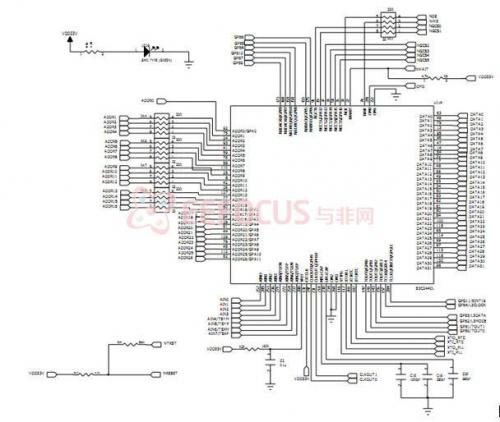
S3c2440A原理图

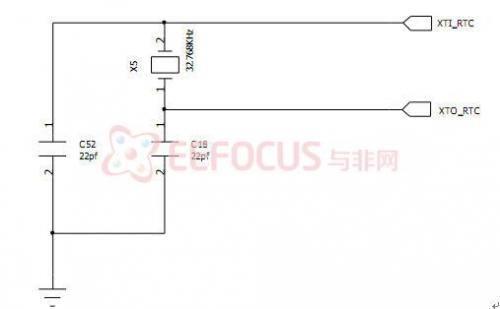
RTC CLOCK原理图
S3c2440B原理图
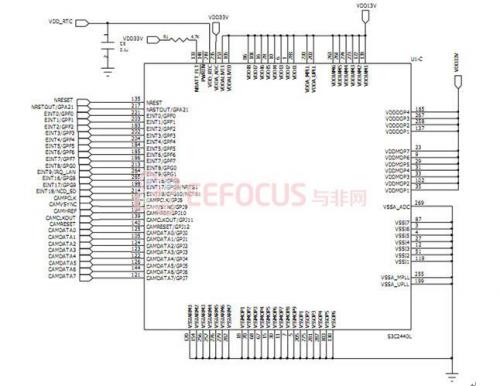
S3c2440C原理图

SDRAM
FLASH128
NOR FLASH
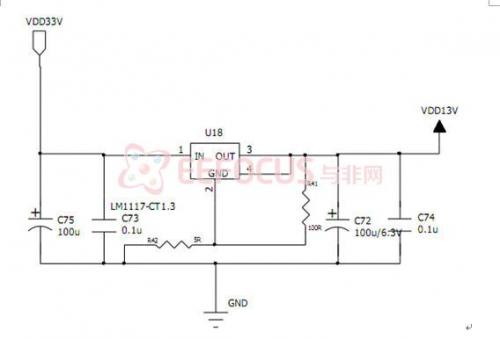
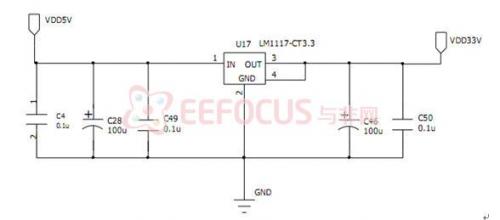
电源稳压模块
地图的制作:
6.1、电子地图数据的提取
MapInfo格式的电子地图是目前使用最为广泛的地图格式之一。由于商用原因,截止至现在为止,MapInfo公司一直没有向外界公布它原始的以矢量形式存贮的文件格式,即TAB格式,这就加大了直接利用MapInfo原始数据的难度。但MapInfo公司也提供了一种与外界交换数据的机制,即MIF(MapInfo Interchange Format)格式地图。MapInfo地图以MIF格式存贮时,每个表的数据都以两个文件保存:一个是扩展名为.MID的文件,它主要用来保存与几个数据相对应的属性数据,通常这些属性数据以特殊的定界符分隔,每条记录各占一行,末尾加回车换行符;另一个是扩展名为.MIF的文件,每个.MIF文件包括文件头和数据区两部分,文件头中主要是对MapInfo如何将这种格式的地图数据生成电子地图的一些说明信息,数据区则主要是几何对象的定义。

Mapinfo 地图图层绘制流程
6.2、基于谷歌地图图片的加载实现
由于直接由Mapinfo 画出来的地图只有点线面,没有一般地图的直观性,因此可通过加载谷歌地图的图片来美化导航系统。用的是谷歌地图BMP格式。
MiniGUI中含有显示BMP和JPG格式图片的接口函数,通过MiniGUI中的API:LoadBitmap(HDC_SCREEN,&Bitmap,"*.bmp(*jpg)")函数来装载谷歌地图,此函数的功能是把*.bmp(*.jpg)地图数据读取到MiniGUI中定义的BITMAP型的结构体
变量Bitmap中。其结构体类型如下:
struct_BITMAP
{
Uint8 bmType;
Uint8 bmBintsPerPixel;
Uint8 bmBytesPerPixel;
Uint8 bmAlpha;
Uint32 bmColorKey;
Uint32 bmWidth;
Uint32 bmHeight;
Uint32 bmPitch;
Uint8* bmBits;
}
然后调用FillBoxWithBitmap(truehdc,y,width,height,&Bitmap)函数显示谷歌地图,其中(x,y)坐标表示地图的顶点坐标。它是通过坐标转换
x=(MAINWINDOW_RX)/2-Bitmapp1.bmwidth/2
y=(MAINWINDOW_BY)/2-Bitmap1.bmeight/2
得来的,其中MAINWINDOW_RX是LCD的宽度,MAINWINDOW_BY是LCD的长度,目的是使地图吕心与屏幕中心重合。
7、基于GPRS与制定服务器端口间的通信
GPS接收机选用了美国Rockwell公司生产的Jupiter 021/031系列GPS OEM板。该接收板有12个并行通道、高灵敏度射频(RF)部分和独具特色的内部DSP及控制处理软件,使Jupiter捕捉和重捕卫星的能力更加迅速,航迹平滑和高效率导航更可靠,而且Jupiter021/031系列GPS OEM板价位低、性能高。它体积小、重量轻、功耗低;自动存储;有极强的抗树阴和高楼遮挡能力;提供载波相位输出;无静态漂移;操作简便、易于开发。它非常适合在各种导航定位设备及车/船等移动目标中使用。
技术指标
|
结构 |
并行12通道,L1波段(1575.42MHz),C/A码(1.023MHz码片速率)+载波波跟踪(载波辅助跟踪) |
|
跟踪能力 |
同时跟踪12颗卫星 |
|
动态性能 |
速度515米/秒,加速度6g |
|
捕获时间 |
TTFF典型重捕获时间2.0秒,TTFF典型温启动15秒,典型初始化启动45秒;TTFF典型冷启动120秒。 |
|
定位精度 |
小于25米 |
|
时间精度 |
1PPS秒脉冲输出,精度1us。 |
|
频率输出 |
10KHz频率输出,与1PPS信号同步,精度1us。 |
|
输出信息 |
经度、纬度、高度、速度、航向、时间、载波相位、自检等几十个数据的十几条组合输出信息(Rockwell二进制格式),输出间隔可调,NMEA-0183,TTL接口 |
7.1、内部结构和引脚说明
这种接收器是通过两个串口与外部通讯的,串口 1为主串口,串口2为辅助串口(提供修正量)。其中,串口1为全双工方式,串口2为半双工方式。系统通过这两个串口同其外部器件或设备连接,也可以用软件编程或硬件设置来配置其串口特性。
接收数据的用户可以选择的存储方式有三种:SRAM、ROM、EEPROM。
接收机内部的一个10kHz的参考时钟输出和一个1pps(每秒一个脉冲)的时钟标输出可用来进行时钟同步,也可用于进行时钟校准。
系统可以通过RESET进行复位。
“Jupiter”GPS/OEM接收机采用20脚DIP封装,常用管脚的说明如表1所列。
表1 “Jupiter”GPS/OEM接收机主要管脚说明
|
管 脚 |
说 明 |
备 注 |
|
2 |
PWRIN_5 |
5V主电源 |
|
5 |
M_RST |
复位输入(低电平有效) |
|
7 |
GPIO2 |
NMEA协议选择 |
|
8 |
GPIO3 |
ROM缺省选择 |
|
11 |
SDO1 |
串口1输出 |
|
12 |
SDI1 |
串口1输入 |
|
15 |
SDI2 |
串口2输入 |
|
18 |
GND |
地 |
|
19 |
TMARK |
1PPS时钟标记输出 |
|
20 |
10kHz |
10kHz时钟输出 |
7.2、数据格式和通讯设置
7.2.1、数据格式
评论