
简单LED显示摇棒制作过程

显示效果图片

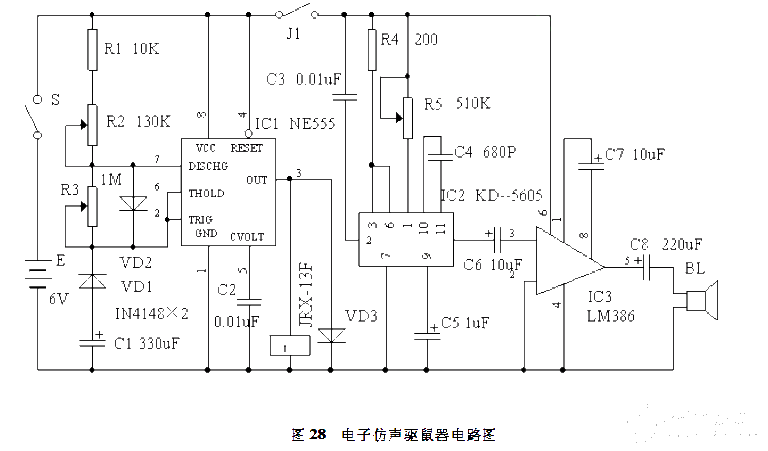
原理图
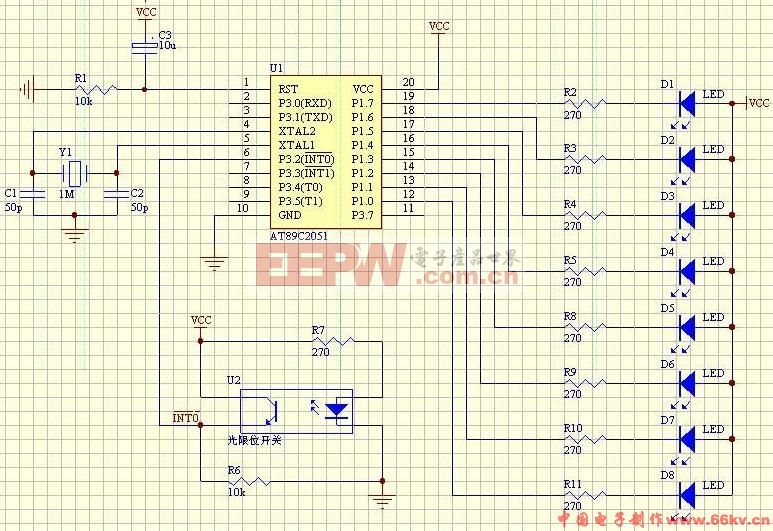
以下是详细说明:
图形显示的原理:
利用人眼的视觉暂留效应,使手在摆动到不同位置的时候,让位于一条直线上的LED(LED(Light-Emitting-Diode中文意思为发光二极管)是一种能够将电能转化为可见光的半导体,它改变了白炽灯钨丝发光与节能灯三基色粉发光的原理,而采用电场发光.)显示二维图像的不同的列,实现图形扫描显示.
物理机制:
当我们在摆动手臂的时候,短时间内摆动位置和左右幅度不会有太大变化,利用我们手臂的这个运动规律,只要能得到棒从一侧摆动到另一侧的时间,然后把这个时间分成N份,然后在每一份的时间里显示不同的花样就能实现图形的显示.当我们在摆动手臂的时候,并不能预先得知此次摆动需要的时间,怎样得到从一侧摆动到另一侧的时间呢?
再想想,短时间内我们手臂的摆动频率也不会有特别大的变化,我们只要能得到前一次摆动所用的时间,然后用这个时间近似得到下一次摆动所需要的时间,然后分N份就可以了.得到一次摆动所需的时间的任务由光遮断器完成,在棒上装一个可以摆动的用来遮挡光遮断器光线的细杆,粗细比光遮断器的狭缝稍宽,我用的是整流桥(整流桥就是将整流管封在一个壳内了.分全桥和半桥.全桥是将连接好的桥式整流电路的四个二极管封在一起.半桥是将两个二极管桥式整流的一半封在一起,用两个半桥可组成一个桥式整流电路,一个半桥也可以组成变压器带中心抽头的全波整流电路, 选择整流桥要考虑整流电路和工作电压.)焊后剪下的一段管脚.每左右摆动一次这个杆就会通过一次光遮断器,使单片机产生一次中断,两次中断之间的时间就是想要得到的时间,实现这个功能用掉2051的一个定时器T0和外部中断INT0.然后用2051的另一个定时器T1,其定时时间是T0的N分之一,每次中断依次显示一列,就是照片上的效果.
再细想一下,手臂摆动的频率大于2Hz的时候才大概能由视觉暂留看出图形,再快也不过十几Hz,由T0为16位定时器的最长计时时间得到2051的时钟频率1MHz最合适,还有遮挡用的细杆的粗细也可以大概估算,使其不会对计时精度产生太大影响.
所用元件:
AT89C2051 8元
高亮LED共8个 3.6元
电池盒 0.5元
单面万用板 8元 可以裁成3块,做3个摇棒
陶瓷谐振器 1元
光遮断器 2元
电阻电容导线 2元
外壳* 0.7元 可以裁成2块
可选元件:
电源开关 1元
总成本不超过20元
此电路电路非常简单,代码短,但是用到了2051的外部中断编程和T0、T1定时器编程,非常适合初学者练习.我制作这个玩具花费了两个晚上的时间.此电路和程序还有扩展改进的空间,如在长时间不摆动的情况下可以使单片机进入省电模式,显示不仅限于对称图片等,大家可以试试.
以下是源程序:
#include reg51.h
#define SEG 17 //每帧图片分成17列来显示
#define INteRVAL 20 //每幅图片在左右摇摆20次后换下一幅
typedef unsigned char uchar;
typedef unsigned int uint;
code char pattern[17][3]={ //3幅图片的字模
{0xff,0xff,0xff},
{0xff,0xff,0xff},
{0xff,0xff,0xff},
{0xff,0x9f,0xff},
{0xff,0x6f,0xf9},
{0xff,0x77,0x65},
{0xfe,0xbb,0x1e},
{0x7e,0xdd,0xfe},
{0x00,0xee,0xfe},
{0x7e,0xdd,0xfe},
{0xfe,0xbb,0x1e},
{0xff,0x77,0x65},
{0xff,0x6f,0xf9},
{0xff,0x9f,0xff},
{0xff,0xff,0xff},
{0xff,0xff,0xff},
{0xff,0xff,0xff},
};
uchar phase,th1,tl1,index,count;
main()
{
EA=0;
EX0=1;
ET1=1;
PX0=1;
IT0=1;
TMOD=0x11;
index=0;
EA=1;
while(1)
{
}
}
void Int0_Handle(void) interrupt 0 using 2
{
uint t0_time;
TR0=0;
TR1=0;
TF1=0;
t0_time=TH08|TL0;
TL0=0;
TH0=0;
TR0=1;
t0_time=65535-t0_time/SEG;
th1=t0_time/256;
TH1=th1;
tl1=t0_time % 256;
TL1=tl1;
if (count3*INTERVAL){ //3幅图片循环
count++;
}
else{
count=0;
}
index=count/INTERVAL;
if (th1!=0xff || tl1!=0xff){ //如果摆动特别慢,定时器溢出就不显示
phase=0;
TR1=1;
}
else{
TR1=0;
}
}
void Timer1(void) interrupt 3 using 3
{
if (phaseSEG) //17段依次显示
{
P1=pattern[phase][index];
phase++;
TH1=th1;
TL1=tl1;
}
}
评论