
高性能DSP在直接转矩控制系统中的应用

1引言
随着电力电子技术、微电子技术、控制理论的高速发展,交流调速技术得到了长足的发展,在高性能的交流调速领域内出现了矢量控制(VC)和直接转矩控制(DTC)两种控制思想。其中DTC技术摒弃了VC中的需要解耦的控制思想,它具有简单的控制结构、良好的动静态性能和快速的响应速度等特点,它一诞生就得到了广泛关注,目前已成为研究的热点问题。本文将介绍基于TMS320F2812 DSP芯片的交流感应电动机直接转矩控制系统。
2直接转矩控制原理结构
直接转矩控制系统基本原理图如图1所示。
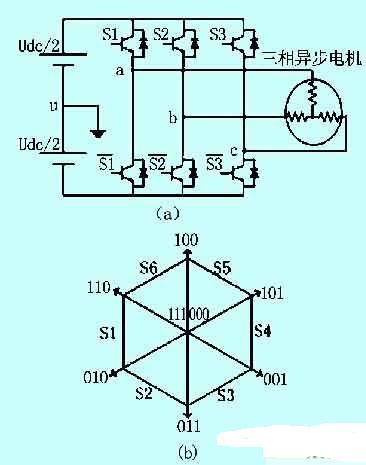
图1直接转矩控制基本原理图
在图1中,逆变器有三个桥臂,每个桥臂上存在互锁的两个开关Si、(i=1,2,3),通过控制Si的开关状态如图1(a)所示,可以得到8个电压空间矢量Us(加到电动机定子绕组上),其中6个为工作电压空间矢量,它们等幅且两两相隔60°,连接这6个电压空间矢量的顶点可构成一个正六边形,另外的两个为零矢量,位于六边形的中心,如图1(b)所示。通过正确的开关的通断,可顺序形成不断旋转的电压空间矢量,从而在异步电动机气隙形成旋转的磁链,而通过零矢量的恰当选择可以控制磁链的平均旋转速度。定子磁链Ψμ、转子磁链Ψγ以及转矩之间Td存在关系: ,θ为定子磁链与转子磁链之间的夹角,即磁通角,Lσ为转子漏感。在实际的运行中,为充分利用电动机铁心,保持定子磁链幅值为额定值,而转子磁链幅值由负载的大小决定,要改变电动机转矩的大小,可以通过改变磁通角θ的大小来实现。在直接转矩控制技术中,其基本控制方法就是通过电压空间矢量Us来控制定子磁链的旋转,控制定子磁链的走走停停,以改变定子磁链的平均旋转速度的大小,从而改变磁通角θ的大小,以达到控制电机转矩的目的[1>.
,θ为定子磁链与转子磁链之间的夹角,即磁通角,Lσ为转子漏感。在实际的运行中,为充分利用电动机铁心,保持定子磁链幅值为额定值,而转子磁链幅值由负载的大小决定,要改变电动机转矩的大小,可以通过改变磁通角θ的大小来实现。在直接转矩控制技术中,其基本控制方法就是通过电压空间矢量Us来控制定子磁链的旋转,控制定子磁链的走走停停,以改变定子磁链的平均旋转速度的大小,从而改变磁通角θ的大小,以达到控制电机转矩的目的[1>.
3高性能DSP TMS320F2812芯片
在直接转矩控制系统中,DSP芯片是控制器的核心,所有复杂的控制算法和控制策略都通过它来实现。TMS320F2812是Texas公司C28TM系列中最新成员,其高速的运算能力、强大的实时处理能力和高度集成化的设计结构,使得它在控制领域内得到了人们的青睐。下面介绍TMS320F2812主要特点,其结构框图[2>如图2所示。
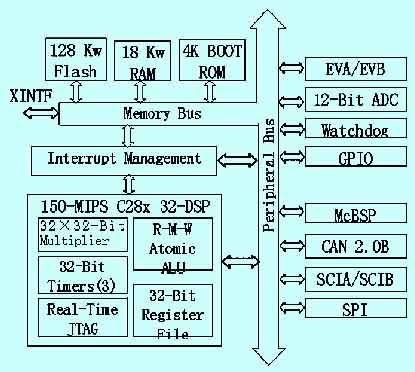
图2 TMS320F2812功能图
TMS320F2812的CPU是基于C28xTM的32位定点内核,主频达150MHz.TMS320F2812芯片具有高度集成的结构,在片内集成大量的外设(如图2所示),这些外设包括:事件管理器EVA/EVB、16通道12位模数转换器ADC、看门狗定时器Watchdog、通用输入输出引脚GPIO、多通道缓冲串行外设McBSP、改进CAN总线接口、双通道串行通信接口SCIA/SCIB、串行外设接口SPI等。与C28xTM DSP以前的芯片相比,TMS320F2812有自己的特点:(1)它是C2000系列中第一代32位的定点DSP芯片(C24xTM为16位DSP芯片);(2)芯片内部有3个32位定时器;(3)具有12位的ADC(以前的为10位)和双通道SCIA/SCIB;(4)有多通道缓冲串行外设McBSP;(5)采用改进的哈佛结构和八级流水线作业;(6)存储空间大大扩展,其片内存储器资源包括:128K字×16位的Flash存储器、128K字×16位的ROM、1K字×16位的OPT ROM、一块1K字×16的SARAM、L0和L1上各有8K字×16位的SARAM、M0和M1上各8K字×16的SARAM;(7)可以执行32×32位的二进制补码乘法操作,并产生64位的结果;(8)它是C2000系列性能最高的芯片,处理速度达150MIPS,实时处理能力强,能应用于很多复杂的控制算法如无速度传感器的定向控制、运动轮廓的识别和功率因数的校正等,并且其代码与以前各个型号的DSP兼容,它也是目前处理C/C++代码效率最高的DSP芯片(就C2000系列而言)。由于这些特点,TMS320F2812DSP有着广泛的应用空间。
4基于TMS320F2812的直接转矩控制系统
由于DSP的优越性能,它可被用于数字化控制中,现介绍一个基于TMS320F2812 DSP的直接转矩控制系统,其方框图[3>如图3所示。
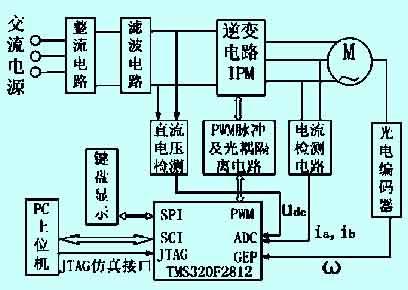
图3基于DSP的直接转矩控制系统原理图
4.1系统组成及其控制原理
系统主要由交流电源、整流滤波电路、逆变模块IPM、交流异步电动机M、TMS320F2812DSP芯片、电压电流检测电路、PWM脉冲及光耦电路、光电编码器、键盘显示及上位机组成。
DSP接收到PC上位机发出的输入信号后,将其转换为PWM输出,经过PWM脉冲电路驱动放大后送给逆变器,逆变器的输出信号接到三相异步电机的定子绕组。从DSP输出的PWM脉冲可以控制逆变IPM模块电路的开关状态,而逆变器开关状态的改变,可在电机定子上形成旋转的电压空间矢量。通过工作电压空间矢量和零矢量的交替选择,可以控制定子磁链的走走停停,这样磁通角(定子磁链和转子磁链的夹角)的大小也相应地随之改变,从而达到直接控制电动机转矩的目的。光电编码器检测电机的转动方向及转角,其输出信号反馈回DSP的正交编码脉冲电路(QEP),形成闭环控制,实时有效地控制电动机。
4.2系统核心—TMS320F2812 DSP控制器
整个系统以TMS320F2812为核心,所有复杂的控制算法及控制策略都是通过TMS320F2812控制器来实现的。从图3知,该系统涉及到DSP的大部分集成外设,如:事件管理器EV、串行通讯接口SCI、串行外设接口SPI、模数转换器ADC、PWM发生模块以及JTAG仿真接口等。下面简单介绍各模块的功能。
(1)事件管理器EV
它是一个专门为控制系统(运动控制和电机控制)设计的模块,包括通用定时器(GP)、全比较单元、捕获单元和正交编码脉冲电路(QEP)等四个基本单元。在该系统中,利用正交编码脉冲电路(QEP)对引脚CAP1/QEP1和CAP2/QEP2(EVA)或CAP4/QEP3和CAP5/QEP4(EVB)上的正交编码脉冲进行解码和计数,直接处理光电编码盘的正交编码脉冲,通过检测2路信号的相位关系可以判断电机的位置和速度信息。此外,事件管理器内部有PWM发生电路,可产生PWM波形,用于控制逆变器开关的通断时间。
(2)串行通讯接口SCI
TMS320F2812设有双通道异步串行外设通信口(包括SCIA和SCIB,24x系列中只有一个SCI),在该系统中它与RS-232或者RS-485等标准接口相接,用于DSP的CPU与PC上位机之间的数字通信。支持半双工、全双工等通信模式。
(3)串行外设接口SPI
SPI是一个高速同步串行I/O口,在该系统中SPI连接DSP控制器和显示器,用于DSP和外部外设之间的数据通信。典型应用还包括作为外部I/O或用于对外设(ADC、显示驱动器等)进行扩展。
(4)模数转换器ADC
ADC模块是一个带采样/保持电路的12位模数转换器,具有自动排序能力,一次最多可执行16个通道的自动转换。它的转换速度很快,在25MHz的ADC时钟时,执行一次转换操作时间为80ns[4>,比F2407快得多。该系统采用一个电压传感器和两个电流传感器,通过检测逆变器前端的母线电压Udc,经ADC采样后可根据当前的开关状态计算逆变器输出电压的usα和usβ分量;同时,电机的两相电流由电流传感器检测后也经ADC模块采样,再经过3/2变换,可求出电流分量isα和isβ,最后根据有关公式可算出磁链和转矩的大小。
(5)JTAG仿真接口
用于系统的在线仿真和测试。
4.3逆变模块IPM
为了提高逆变电路的可靠性,系统采用日本三菱的IPM智能模块,型号为PM25RSB120,其内部有7只IGBT,除用于三相桥臂外,另外一只可做泵升电压的旁路开关。IPM不仅将功率器件IGBT和驱动电路集成在一起,而且对过流、过压、过热以及控制电压欠压等故障具有自动保护的功能,是一种故障率低、又可使装置小型化和轻量化的功率器件,还可以大大降低输出电压低次谐波的含量。当检测信号之一不正常时,DSP迅速将PWM输出端设为高阻,封锁脉冲输出,从而进行有效保护。
为避免DSP工作不正常时IPM的上下桥臂“直通”现象,在每对PWM信号先加互锁电路,然后到隔离驱动和电平转换再送IPM的控制端,如图4所示[5>.

图4 IPM门极互锁驱动电路
IPM采用四组独立的15V驱动电源供电,光耦用快速6N137,以保证隔离信号响应快,输出信号好。系统中的其它模块在此不作介绍。
5结束语基于TMS320F2812的高性能直接转矩控制系统,充分利用TMS320F2812运算速度快、处理能力强、实时性好和高度集成等优点,系统结构简单可靠、控制精度高、动态响应快,是高效的交流调速控制系统。另外TMS320F2812具有体积小、功能全、可靠性高、成本低、可扩展性强等特点,可广泛应用于工业数据采集和控制等应用领域,同时它也为实现数字化控制提供了有效的途径。
评论