
用可编程序控制器控制的魔力小球

1.引言
传统的电气控制系统是由继电器等元件组成的逻辑电路来实现控制的。
这种系统是将继电器、接触器、开关、按钮等电气元件用导线连成控制回路,由于这种控制形式存在体积庞大、触点多、可靠性差、改造困难等缺点而逐渐被计算机控制所代替。现代化的工业控制大多由微机来实现,但微机原理比较抽象,应用起来有一定的困难,也不便于交流,更难于在现实生活中推广使用。
PLC(pogrammable LogiCController)是可编程序控制器的简称,是一种在微机基础上开发出来的控制装置,控制过程由程序来实现。它的内部结构同微机类似,包括:中央处理单元( CPU)、用于存储系统控制程序和用户程序的存储器、进行数据通信的接口电路以及电源等。PLC的工作原理可分为三个阶段:程序开始时,PLC监控程序以扫描方式将输入端的信号依次读入内部映象寄存器。当所有信号采样完毕即开始进行逻辑运算处理。处理过程是根据输入信号将程序中相对应的部分读入,然后看是否有输出,如果有输出就将相应的输出元件(在程序中用软件符号表示)进行驱动并将这种逻辑运算结果存入输出映象寄存器。最后,将输出映象寄存器中的内容读入到输出锁存寄存器,驱动对应的输出部件动作。PLC程序一旦运行后就会一直持续下去,只有接到停止命令后才会停下。由PLC的工作原理及特点可知,PLC易于实现各种开关量的控制和顺序控制,因此特别适合需要循环控制的场合。魔力小球装置正是因为有这样的控制要求,所以我们选用PLC作为其电气控制部分的核心。
2.魔力小球装置的制作原理
魔力小球装置的设计思路是受到一个有趣的物理现象的启发。大家都知道空气被压缩在容器内所产生的弹性使人们制造出皮球、轮胎、气垫船等物品。人们利用打开压力容器盖子时瞬间喷射出压力气流的原理发明出了喷雾器。如果压缩空气能源源不断地从喷气口中喷出,便会形成气流;通过控制气流流量便能控制气流的强弱,于是气流便像喷泉一样变化多端。为了直观地看出气流变化,我们在五条气流上各放置五只乒乓球,随着气流高低变化,乒乓球相应地抛上跌落:根据PLC事先编好的程序将五个乒乓球在空中组合出不同的形状。预先设定好的形状有:正弦、余弦、正抛物线和倒抛物线等形状。
这五个不断变化着舞姿的乒乓球装置我们称之为“魔力小球装置”。这个装置由三个部分组成,分别是:气源部分、控制部分、执行部分。
气源部分的主体是一个空气压缩机,它将外部空气吸入,经油水分离等处理后在储气罐内存储有一定压力的压缩空气,输出时经压力控制阀就可得到所需压力的干净的压缩空气气源。空压机的输出口装有截止阀,控制气流输出口接10mm的气管,由“10转8”和“8转6”的气动专用接头将气管转成6mm口径,并连接到执行部分(见下图)。
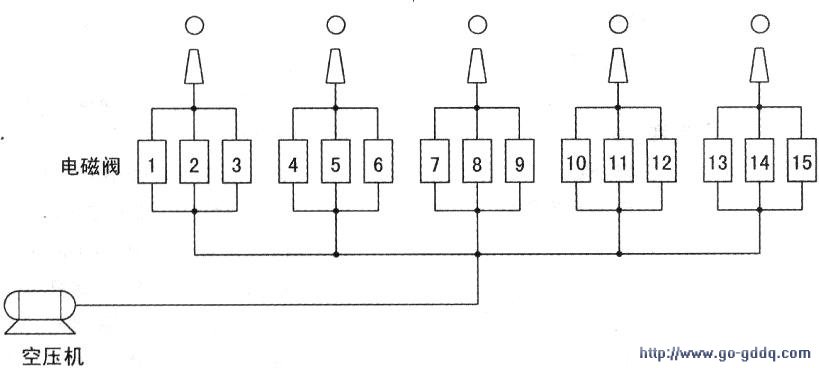
执行部分主要由电磁阀、气管、喷气头等组成。我们将以三个电磁阀为一组,控制一个喷气头的流量,以替代流量控制阀。魔力小球装置共有五组喷气头,每个喷气头控制一个乒乓球,电磁阀固定在有机玻璃底板上。三个电磁阀的输入口与五通接头的三输出口相连,空压机的气管连到第一组输入管接头,输出端则与第二组输入管接头相连,以此使五组电磁阀的输入口与气泵的输出口连成气动回路。喷气头用管接头直接固定在有机玻璃面板上,全部执行机构安放在透明的有机玻璃罩内,使得执行机构工作时一目了然。
控制电磁阀动作由两台日本三菱F1系列的PLC和驱动电磁阀的直流电源组成,这些装置均固定在一块PVC板上。对一组电磁阀而言,输入的总压力不变,当PLC让三个电磁阀全得电时,气源的流量最大,相当于气源直接连到喷气头上,此时的乒乓球被喷得最高;当两个电磁阀得电时,电磁阀输出的流量减少三分之一,乒乓球处于中间位置;由此类推,当只有一个电磁阀得电时,乒乓球的位置处于最低点。在PLC程序控制下每组电磁阀得电情况的不同,使得乒乓球的高度也不同,不同高度的乒乓球悬在空中组合成一种图形。当一组图形形成后,通过一段时间的延时,PLC使乒乓球切换出另一组图形,五组图形循环出现,从而实现了PLC自动控制的目的。
3.PLC与外负载的连接
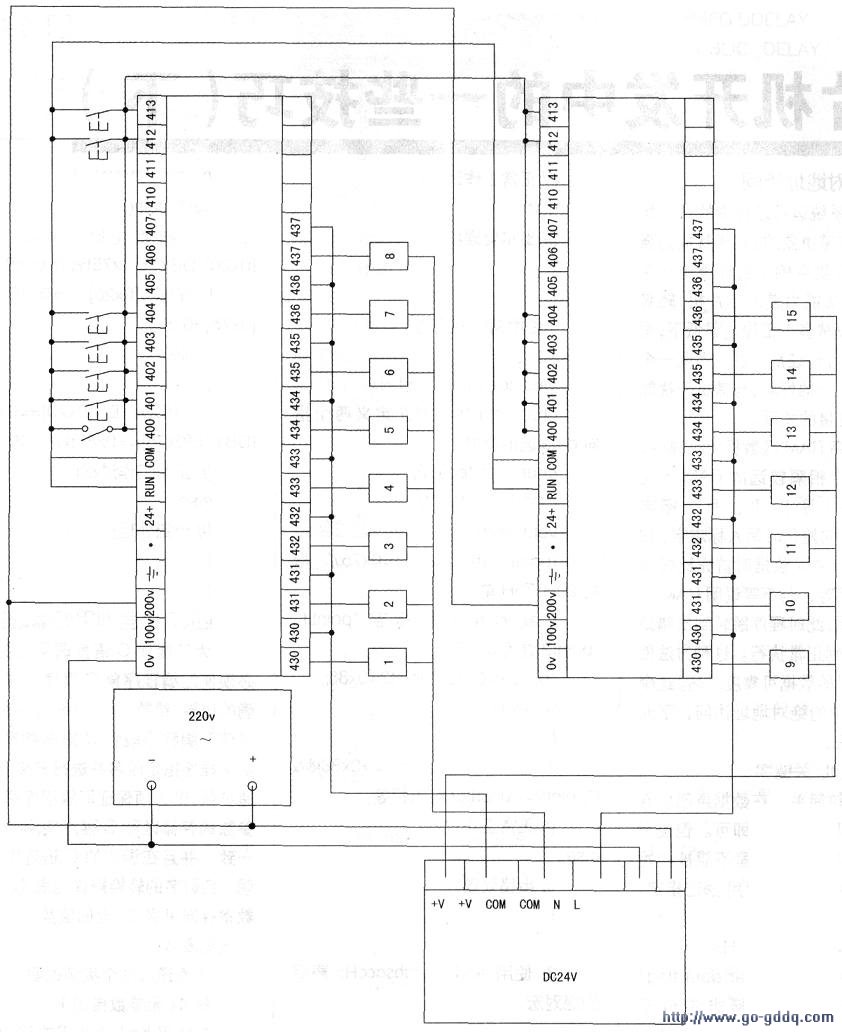
首先要把220V交流电接入设备中,将两台PLC标有200V的端子和直流电源上L端与交流电源的相线联接,PLC上标有OV的端子和直流电源上N端与交流电源的中心线联接,这样分别把220V交流电接入设备中(见下图)。
电磁阀是由24V直流电源驱动的,把所有电磁阀的正端连到电源上标有+V的24伏直流电压输出端子上;电磁阀又作为PLC的输出驱动负载,把它的负线连接到PLC的输出端430~437。PLC输入输出端与COM端是等电位的,内部+24V电源的负端是COM口,而输出端的COM口与输出端在内部有开关相连。因此,直流电源上的COM端只有和PLC上的COM端相连才能形成回路。这样,PLC和外负载连接后,外负载与其驱动电源也连接好了。最后是PLC输入端开关信号的连接。虽然PLC输入端和COM口的电位相等,但在内部并不连在一起,而是通过外部开关将两个端子连在一起。开关的正极连到PLC输入端,负极连到COM口。由于PLC的输出端只有8个,被控的电磁阀有15个,所以控制系统中用到了两台PLC。作为输出扩展的两台PLC的输出端只和相应被控的电磁阀相连,程序也根据控制对象不同分别编程为达到PLC都能同时输出的目的,需要用同一个开关的两个端子引两根线出来分别连到PLC的输入端和COM口。
4.程序设计
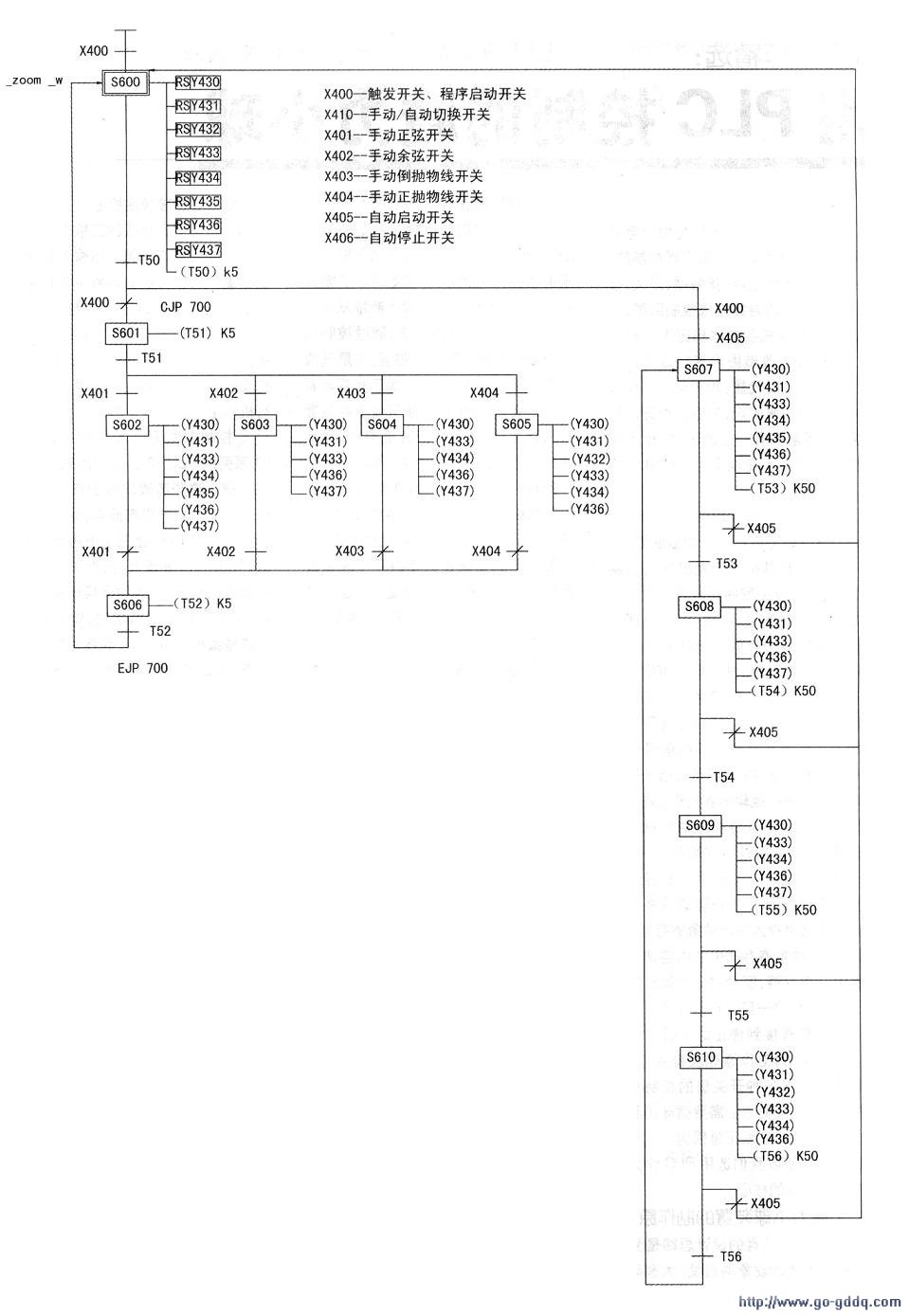
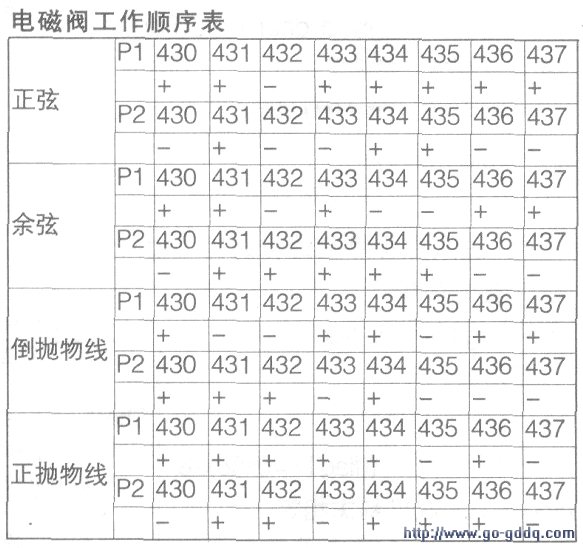
魔力小球装置的PLC程序是用步进顺控指令编写的,程序结构分自动和手动两部分。手动部分用选择性分支/汇合的方式编写,实现四种图形可任意控制和切换;自动方式用一般的状态转移方式编写,实现自动循环。下图是程序的流程图,附表为电磁阀的工作顺序表。
注:
1.由于笔者使用的是Fl系列的老型号可编程控制器,流程图和梯形图的表达与通用的FX系列有很大的不同,此处还是用FX系列的格式来表达,容易接受。
2.两台可编程控制器的程序所对应的输出在电磁阀工作表中已列出,限于篇幅,因此只画了第一台编程器的程序流程图,另一套PLC程序不再赘述。
当X400所对应的开关接通,进入初始状态S600,对整个输出端进行初始化复位。X410作为手动/自动的转换开关,未接通时进入手动状态.401、402、403、404任意一个开关合上,小球相应地走出一种图形;开关断开立即回到初始状态。
在自动方式中按下启动按钮X405,小球先组合出正弦图,每延时5秒分别组合出余弦、正抛物线、倒抛物线等图,然后再回到正弦图。当按下停止按钮时,程序回到初始状态S600。
5.小结
PLC拥有了计算机控制的极大部分优点,同时它的程序常用梯形图来表达,梯形图类似于电器控制图,比较直观,凡有电子技术基础的人都能在短时间内学会和掌握。由此可见.PLC能发挥计算机和传统继电器逻辑控制的优点,将能广泛应用于工业和生活等各领域。有了PLC的帮助,开发一个系统的主要工作由以前的构造数学模型、设计通道、制作硬件转变为现在的程序设计和把信号、负载联接到PLC上,这样一来可以省下大量的时间用于程序调试和系统完善等工作。从而达到可编程序控制器应用灵活、简单易学、容易扩展的效果。
评论