
电源远程控制器的制作

一、 原理简介
该方案的框图如下:
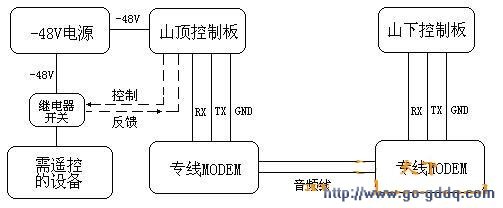
山顶机房及山下机房各安装一块控制板,两者之间通过专线MODEM相连。山下控制板主要功能是:将操作人员的开关信息转换成指令,发送给山顶控制板,并根据山顶控制板发来的电源通断状态报告指令,以指示灯的形式显示给操作人员。山顶控制板主要功能是:通过控制继电器的吸放来控制设备的电源,该板在接收到山下控制板发来的开关电指令后,驱动继电器的吸放,并将继电器的反馈状态转换成指令,报告给山下控制板。两处的专线MODEM由本单位内部的光纤通信设备提供的音频线路连接。
二、山顶控制板
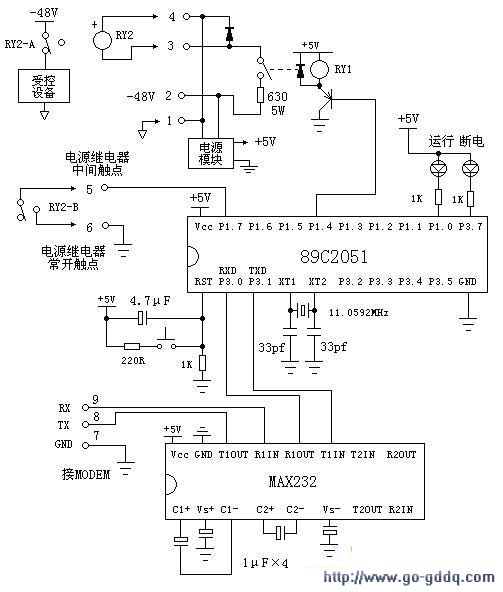
山顶控制板所包括的主要元件有单片机芯片89C2051,电平转换芯片MAX232,电源模块。由于需遥控的通信设备使用-48V电源,山顶控制板也采用-48V。该板采用了一个成品开关电源模块,将-48V转换成+5V。芯片MAX232的功能是把单片机串口的TTL电平转换成MODEM的RS-232电平,使单片机能通过MODEM收发数据。2051单片机根据山下控制板发来的指令,通过P1_4脚控制线圈电压为5V的小继电器RY1的吸放,进而控制电源继电器RY2的吸放。电源继电器RY2为两组触点、24V线圈电压的大继电器,触点可承受较大电流。其中的一组触点用于控制设备电源的通断,接中间触点及常闭触点。继电器释放时,设备加电,继电器吸合时,设备关电。另外一组触点作为继电器动作后的反馈,接中间触点及常开触点,分别接地及2051的P1_7脚。当继电器RY2吸合时P1_7经继电器接地,为低电平,继电器释放时P1_7脚为高平(2051内部有上拉电阻)。单片机2051每秒钟检测一次P1_7脚是否接地,以此判定继电器是否吸合(即是否断开了设备的电源),随后将检测的结果转换成指令,通过MODEM向山下的控制板汇报,同时本身的断电指示灯也显示出设备的加断电状态。
山顶控制板的电路图如下:
山顶控制板的程序如下:
#include "atmelAT89X51.H"
#define SYN 'Z' //来自山下控制板数据帧的同步字符
char countdown; //时间计数
char TX_buf[3]; //发送缓冲区
char TX_len; //发送字符串长度
char TX_num;
char RX_buf[3]; //接收缓冲区
char RX_len; //接收字符串长度
char RX_num;
char CRC(char *buf,char len) //校验码生成函数
{char i,temp;
temp=0;
for(i=0;ilen;i++) temp=temp^buf[i];
return(temp);
}
void timer0_int() interrupt 1 //定时器0的中断服务程序
{ TL0=0x00; TH0=0x0A6;
countdown--;
if(countdown==0 || countdown==20)
P1_0=!P1_0; //控制CPU运行指示灯的秒闪
if(countdown!=0) return;
countdown=40; //过了一秒钟
P3_7=P1_7; //检测电源继电器的吸放状态,并驱动P3_7的指示灯
if(P1_7) TX_buf[1]=0x13; //高电平,电源继电器已释放,设备电源接通
else TX_buf[1]=0x31; //接地,电源继电器已吸合,设备电源中断
TX_buf[2]=CRC(TX_buf,2); //生成校验码
TX_num=0;
SBUF=TX_buf[0]; //向山下控制板报告继电器的吸放状态
}
void serial_int() interrupt 4 //串口中断服务程序
{ if(TI) //发送触发了中断
{ TI=0; TX_num++;
if(TX_numTX_len) SBUF=TX_buf[TX_num];
}
else //接收触发了中断
{ RI=0; RX_buf[RX_num]=SBUF;
if(RX_num==0 RX_buf[RX_num]!=SYN)
return; //在接收的数据中搜索同步字符
RX_num++;
if(RX_num==RX_len) //收完一条指令
{ RX_num=0;
if(RX_buf[RX_len-1]==CRC(RX_buf,RX_len-1)) //检查校验码是否正确
{ if(RX_buf[1]==0x13) P1_4=1; //释放小继电器RY1及电源继电器RY2
if(RX_buf[1]==0x31) P1_4=0; //吸合小继电器RY1及电源继电器RY2
}
}
}
}
void main()
{ IE=0x92;
TMOD=0x21; //定时器1:模式2,定时器2:模式1
TL1=253; TH1=253; // 9600波特率
TR1=1; //启动定时器1
SCON=0x50; //串口:模式1
TL0=0x00; TH0=0x0A6; //定时器0定时0.025秒
TR0=1; //启动定时器0
countdown=40; //1秒=0.025*40
P1_4=1; //释放继电器RY1、RY2
TX_buf[0]=0x7E; TX_len=3;
RX_num=0; RX_len=3;
while(1) ;
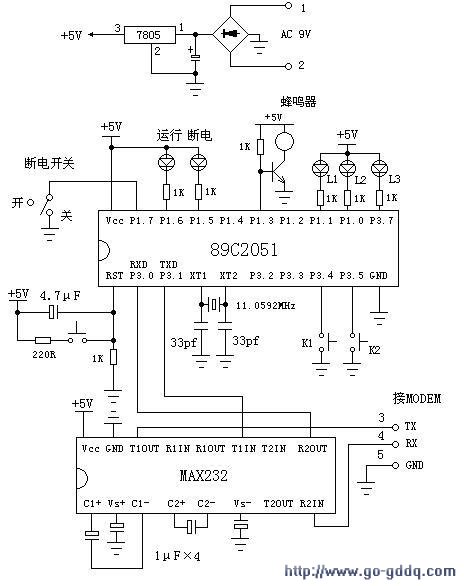
三、 山下控制板
山下控制板的电路图如下所示,所包括的主要元件有单片机芯片89C2051,电平转换芯片MAX232,7805稳压芯片。芯片MAX232的功能是把单片机串口的TTL电平转换成MODEM的RS-232电平,使单片机能通过MODEM收发数据。需要对山上设备进行开关电操作时,先把连接在2051单片机P1_7脚的断电开关拨到“开”或“关”的位置,然后连续按下K1按键,直到L1、L2、L3三个操作指示灯全亮,接着按一下K2按键,L1、L2、L3指示灯全灭,此时2051单片机检查P1_7脚的电平,如果是低电平,则向山顶控制板发断电指令,如果是高电平,则向山顶控制板发加电指令。K1、K2的其它按键组合均不使单片机发送加断电指令。这里采取断电开关与按键相结合的控制方式,目的是为了防止意外的开关操作,提高安全性。MODEM通信正常的情况下,山下控制板每秒钟收到一次山顶控制板发来的加断电状态报告。当接收到状态报告后,经单片机分析,如果是断电状态,则P1_5脚输出低电平,点亮断电指示灯,P1_3脚输出高低脉冲,驱动蜂鸣器告警提示;如果是加电状态,断电指示灯灭,蜂鸣器静音。如果连续3秒钟收不到山顶控制板的状态报告,断电指示灯将作秒闪、蜂鸣器告警,提示操作人员检查MODEM线路是否正常。
山下控制板的程序如下:
#include "atmelAT89X51.H"
#define SYN 0x7E //山顶控制板发来数据帧的同步字符
char countdown; //时钟计数
char TTL; //通信中断的时间门坎值,设置为3秒
bit link_error; //通信中断标志
bit power_on; //山上设备是否加电的标志
bit km; //按键消抖动标志
bit kp; //按键操作已处理标志
char TTW; //发送指令前的时间计数
char TX_buf[3]; //发送缓冲区
char TX_len; //发送指令长度
char TX_num; //当前发送的字符序号
char RX_buf[3]; //接收缓冲区
char RX_len; //接收指令长度
char RX_num; //当前接收的字符序号
char CRC(char *buf,char len) //校验码生成函数
{char i,temp;
temp=0;
for(i=0;ilen;i++) temp=temp^buf[i];
return(temp);
}
void timer0_int() interrupt 1 //定时器0的中断服务函数
{ bit key1,key2;
TL0=0x00; TH0=0x0A6;
countdown--;
if(countdown==0 || countdown==20)
{ P1_6=!P1_6; //CPU运行指示灯秒闪
if(link_error)
P1_5=!P1_5; //通信中断,断电指示灯秒闪
else
{ if(power_on) P1_5=1; //设备加电,断电指示灯灭
else P1_5=0; //设备关电,断电指示灯亮
}
}
if(power_on !link_error) //当设备加电且通信正常
P1_3=0; //关闭蜂鸣器
else //当设备断电或通信中断
{ if(countdown==0) P1_3=0; //蜂鸣器告警
if(countdown==5) P1_3=1;
if(countdown==10) P1_3=0;
if(countdown==15) P1_3=1;
}
key1=P3_4; key2=P3_5;
if(key1==1 key2==1) { km=0;kp=0; } //两个按键均没有按下
else
{ if(km==0) km=1; //设消抖动标志
else
{ if(kp==0)
{ kp=1;
if(key1==0) //按键K1被按下
TTW=(TTW+1)%4; //计算K1连续按下的次数
if(key2==0) //按键K2被按下
{ if(TTW==3) //如果K1已被连续按了三次
{ if(P1_7) TX_buf[1]=0x13; //发加电指令
else TX_buf[1]=0x31; //发关电指令
TX_buf[2]=CRC(TX_buf,2);
TX_num=0; SBUF=TX_buf[0];
}
TTW=0; //不管K1已按下几次,K2按下后复位TTW计数器
}
}
}
}
if(countdown!=0) return;
countdown=40;
if(TTL==0) link_error=1; //TTL减到0,表示通信中断
else TTL--; //每隔1秒对TTL作减1操作
}
void serial_int() interrupt 4 //串口中断服务程序
{ if(TI)
{ TI=0; TX_num++;
if(TX_numTX_len) SBUF=TX_buf[TX_num];
}
else
{ RI=0; RX_buf[RX_num]=SBUF;
if(RX_num==0 RX_buf[RX_num]!=SYN)
return; //在接收到的数据中搜索同步字符
RX_num++;
if(RX_num==RX_len) //接收到一完成指令
{ RX_num=0;
if(RX_buf[RX_len-1]==CRC(RX_buf,RX_len-1)) //检查校验
{ if(RX_buf[1]==0x13) power_on=1; //加电状态
if(RX_buf[1]==0x31) power_on=0; //断电状态
TTL=3; link_error=0; //通信正常,重置TTL值
}
}
}
}
void main()
{ IE=0x92;
TMOD=0x21; //定时器1:模式2,定时器0:模式1
TL1=253; TH1=253; //9600波特率
TR1=1; //启动定时器1
SCON=0x50; //串口:模式1
TL0=0x00; TH0=0x0A6; //定时器0定时0.025秒
TR0=1; //启动定时器0
countdown=40; //1秒=0.025秒*40
TTL=3; //连续3秒收不到报告,表示通信中断
TTW=0;
km=0; kp=0;
link_error=1; power_on=1;
TX_buf[0]='Z'; TX_len=3;
RX_num=0; RX_len=3;
while(1)
{ if(TTW==0) { P3_7=1; P1_0=1; P1_1=1; }
if(TTW==1) P3_7=0;
if(TTW==2) P1_0=0;
if(TTW==3) P1_1=0;
}
四、MODEM通信线制作
单片机2051与MODEM之间的串口通信电缆只用RX、TX、GND三根线,其他的握手信号均没有使用,但在制作MODEM一端的接头时应要按下图制作:


评论