
一款防丢器的制作

防丢器分子机和母机,子机可挂在提包或小孩身上,母机挂在主人身上,如果提包或小孩离主人较近时,母机能收到子机发出的微弱信号,母机不报警。但当提包被贼盗走或小孩走远时,母机接收不到子机的信号,母机立即报警,提醒主人。报警时,蜂鸣器发声,振动电机振动。
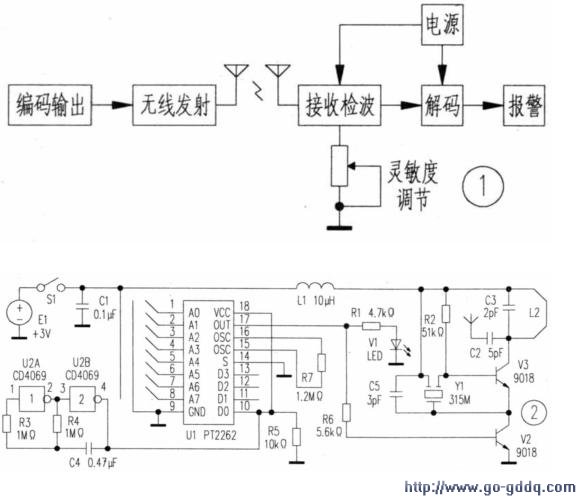
1.电路框图
电路框图见图1,左边是子机,右边是母机。子机由编码电路和无线发射电路组成,不同子机编码不一样,以免相互干扰,无线发射频率采用315MHz或433MHz,母机由再生式接收、解码、报警及电源电路等组成。
2.子机电路
电路见图2所示,子机电源采用3V的扣式电池,以减小体积,电源若采用1.5V的7号干电池,则还要加一个升压电路。电路主要由多谐振荡器、编码器、发射电路等组成。多谐振荡器是由门电路组成的不对称多谐振荡器,振荡周期T=2.2R4C4=2.2×1M×0.47μF≈ls多谐振荡器的作用是间歇地给U1供电,当振荡器输出高电平时,U1得电工作,编码器、发射电路只有此时才工作,可大大节省电能。
编码器用PT2262,采用贴片封装,可减小整机体积,PT2262/2272是一种CMOS工艺制造的低功耗、低价位通用编解码电路,有8位(A0~A7)三态地址端管脚(悬空、接高电平或接低电平),任意组合可提供6561个地址码,PT2262最多可有4位(D0~D3)数据端管脚,设定的地址码和数据码从⑩脚串行输出。PT2262/2272的编码必须一致,地址码不同将不能解码。
编码芯片F12262发出的编码信号由地址码、数据码、同步码组成一个完整的码字,当多谐振荡器输出低电平时,其脚为低电平,315MHz的高频发射电路也不工作,当多谐振荡器输出高电平时,PT2262得电工作,其脚输出经调制的串行数据信号,当脚为高电平期间315MHz的高频发射电路起振并发射等幅高频信号,当脚为低电平期间315MHz的高频发射电路停止振荡,所以高频发射电路完全受控于trl2262的脚输出的数字信号,从而对高频电路完成幅度键控(ASK调制)相当于调制度为100%的调幅。V1为指示灯,发射电路工作时会亮起。图中L2采用板载电感。
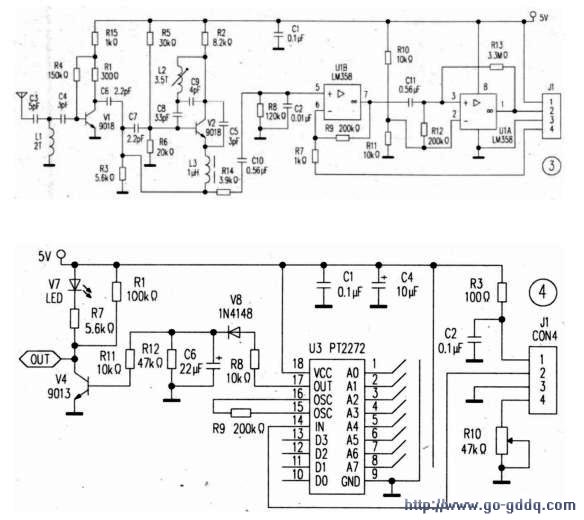
3.接收电路
接收电路由高放、超再生式检波电路和放大电路等组成,图3中V1及外围电路组成高放,V2和外围电路为超再生式检波电路,L2调节接收频率,调节它可使电路接收频率为315MHz。
C2是滤除高频载波,放大电路由两级运放组成,R7外接电位器,可调节第一级运放的放大倍数,实际上调节了接收距离。如果接收电路收不到子机的信号,接收电路输出为无规则的杂波,相反接收电路如收到子机的信号,接收电路输出波形与子机编码输出的波形相同。
4.解码电路
图4解码电路中,R10是调节接收灵敏度的电位器。R9是振荡电阻,其阻值必须与Fr2262的R7对应,有多种组合方式。解码芯片Fr2272的脚接收到信号后,其地址码经过两次比较核对后,OUT脚才输出高电平,与此同时相应的数据脚也输出高电平,这时V4导通,发光二极管V7亮,表示收到子机的信号,V4的集电极电位为低电平。如果解码心芯片PT2272接收不到信号,OUT脚为低电平,V4截止,V4的集电极电位为高电平,发光二极管V7不亮,表示收不到子机信号。
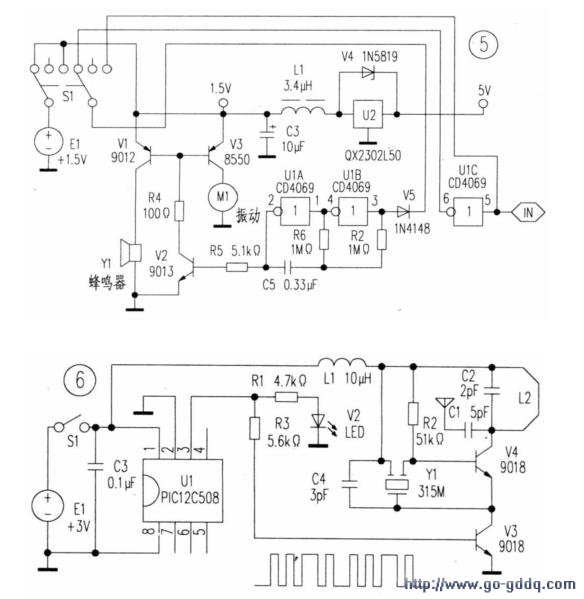
5.报警和电源电路
报警电路主要由一个多谐振荡器和输出电路组成,图5中当S1右掷时,为防丢状态,若图4解码电路收到信号,图4电路输出低电平,这个低电平连至图5的IN端,则多谐振荡器被V5短路接地而不能起振,报警电路不工作。相反图4解码电路收不到子机信号,图5的IN端高电平,V5截止,图5中的多谐振荡器起振,间歇输出高电平,高电平时,V1、V2和V3导通,蜂鸣器发声,振动器振动,以提醒主人。
当S1中掷时,为关机状态。S1左掷时,为寻找子机状态,报警电路处于相反工作状态,即收到子机信号,发出报警声,适当调节接收灵敏度,能逐渐接近子机,直至最后找到子机。
电源电路为一个高效率、低纹波的高频PFM升压DC-DC变换器,工作频率最高为500kHz,输出最大电流约400mA,最高效率约87%,外围电路元件很少,型号为QX2302L50,50表示输出电压5V。
整机电路应采用贴片封装的元件,以减小整机的体积。
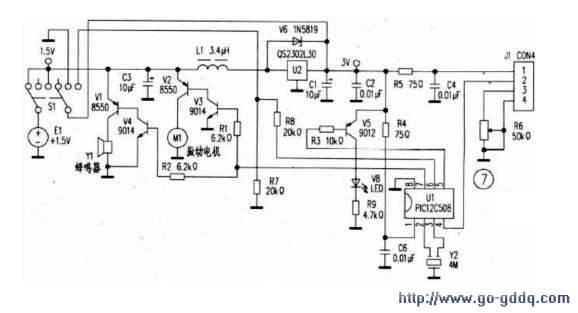
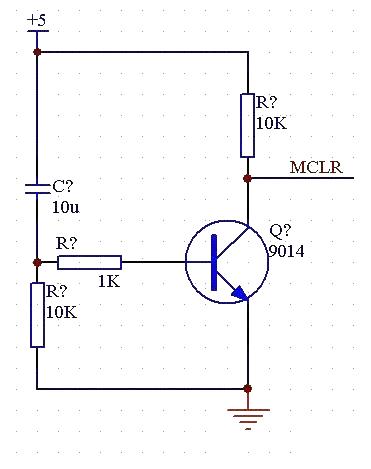
6.采用单片机控制
如果用单片机实现这个电路,则电路会更简单。单片机可用PIE12C508,贴片封装,只有8只引脚。电路见图6和图7所示。
图6是子机电路,发射部分不变,脉冲编码用PIC12C508,编码时可编一定数量的不同的码,只要改变一下脉冲宽度即可,这样每个子机编码一般是不同的。
母机的接收电路与图3是基本相同的。当母机电路的S1左掷时,为防丢状态,中掷时关机,右掷时寻子机状态。初次使用时,要初始化,S1左掷,子母机靠近,PIC12C508的④脚收到子机脉冲,记下编码方法,即学习,学习成功时,U1的⑦脚输出一个高电平脉冲,报警声响,说明学习完毕。在使用中,若母机收到子机信号,则U1的⑦脚为低电平,⑤脚输出频率约1Hz的脉冲,使V8闪烁,表示收到子机信号。若母机收不到子机信号,U1的⑦脚间歇输出高电平,高电平时,报警电路V1~V4导通,报警电路工作,⑤脚输出高电平,V8一直亮,表示收不到子机信号。
当S1右掷时,U1的⑥脚为高电平,表示处于寻子机状态,U1内部判断相反,变成收到子机信号,电路报警,收不到子机信号不报警。
7.结束语
由于电路发射和接收具有一定方向性,因此调节距离并不准确,电路经制作实验,不同方向上距离相差不是很大,能达到一般使用要求。控制芯片采用PT2262/2272的,电路成本和体积会大些,采用单片机的,电路简单一些,体积也更小。
评论