
一款简单而廉价的超声波运距离障碍物检测电路

在设计机器人时多数情况下需要考虑如何使机器人自动避开障碍物,而选择避开障碍物传感器的设计方案时主要依据障碍物与机器人之间距离的半径范围,当障碍物距离机器人距离在lOmm半径范围内时较多设计者选择红外线传感器,当距离超过lOmm半径时,因为受到红外线接收器灵敏度的限制,红外线传感器方案已不适合,此时选用超声波检测器方案可以有效解决障碍物在6cm半径范围之内机器人如何自动避开障碍物的问题。下面介绍这款仅利用一些非常普通且便宜的元器件构成的超声波远距离障碍物检测器电路可以很好的满足设计者的要求,检测器电路的设计基于超声波发射原理,但此电路不具备测距仪的功能,仅仅完成判断机器人前方是否存在有障碍物的功能。
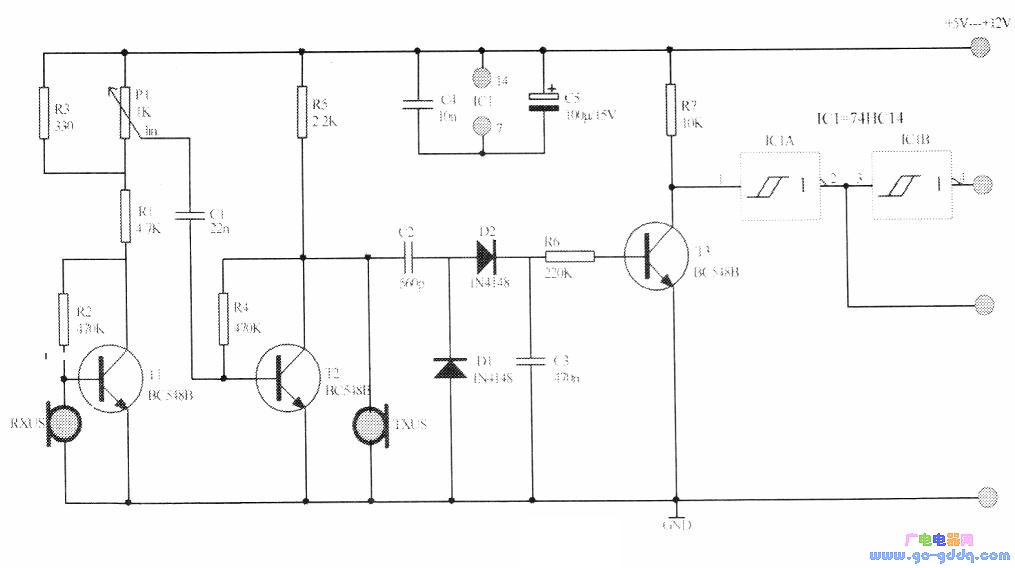
检测器电路:见下图。超声波接收器RXUS输出信号接到三极管T1的基极作为后级电路的输入,T2的输出端接超声波发射器TXUS而构成了一个依赖接收器RXUS输出信号大小而输出振荡幅度大小不同的环路。由于图中所设定参数使得三极管T1和T2的增益较大,应适当调节可调电阻P1使前方无障碍物时环路不会出现自激现象。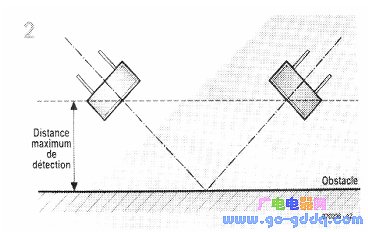
电路工作原理;当障碍物与检测器之间的距离满足振荡环路的起振条件时,T2的集电极端输出40kHz的正弦波,此正弦波经过二极管D1、D2整形和C3的滤波后加在电阻R6上,正弦波的幅度大小会引起三极管T3集电极端电压变化,如果T3集电极端电压高于IC1(74HCl4)门阀电压,ICI.A输出高电平,IC1.B输出低电平,后级电路可以依据IC1.A和B端电平的变化来判断是否前方有障碍物。由于障碍物的对超声波吸收特性和障碍物距离检测器距离远近等原因,很难精确定义三极管T3集电极电压状态,因此IC1输出端电平不依赖于三极管T3开/关状态的变化而变化,仅仅当T3集电极电压高于IC1的门阀电压时IC1的输出电平发生变化oIC1在此电路的主要作用是将T3集电极端电压转换为逻辑电平。
电路设计要求:电路可以使用5V~12V的宽电压供电,三极管T1和T2电路的增益决定了检测器的灵敏度,因此电压的选择对检测器的灵敏度有较大的影响,如果需要较高的灵敏度可以使用高电压供电。在绘制PCB板时,为了防止超声波接收器和发射器发生偏振,应保证GND管脚良好接地,并注意接收器和发射器在PCB板上的放置位置,为了得到更好的检测效果,可以参照右图设计。
电路调试:虽然电路简单,但在较好的环境下,无需调整下图中的电路参数检测器就可以达到5~6cm的有效检测距离,如果需要满足近距离检测可以调整P1减少增益。
评论