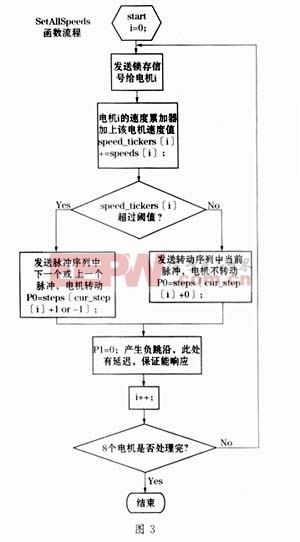
舞蹈机器人步进电机驱动电路和程序设计 发布人:dolphin 时间:2011-07-29 加入技术交流群 扫码加入和技术大咖面对面交流海量资料库查询 收藏 大范围内变化。 (2)设置指针cur_step[8]指向8个电机当前处在脉冲序列step[8]中的位置。 易知:0=step[i]=7,其中,i分别代表8个电机。组数据(需占用1.5K存储空间,AT89C52足够)。如果人工填写这些数据,将十分困难。因此在实际的运用中,我们用C+Builder编写了机器人模拟程序,采用图形界面,预一化速度和时间信息,写入data.h,只要将其作为头文件,电机驱动程序将自动读取。参考文献 关键词: 舞蹈 机器人 步进 电机 驱动 程序设计 相关电路 舞蹈 机器人 步进 电机 驱动 程序设计 数显式时间继电器电路 桥式直流电动机恒速电路 脉冲信号整形电路 脉冲量输入信号调理电路 离心机断续运行控制电路 可调整的压控调节器闭环电路 上一篇:LonWorks技术在药厂环控中的应用 下一篇:力敏应变与单片工作桥式力敏电桥1电路图 相关新闻 舞蹈 机器人 步进 电机 驱动 程序设计 小型舞蹈机器人的驱动系统设计 基于嵌入式Linux的步进电机驱动程序设计 舞蹈发光二极管电路 基于A3992和C8051F300的两相步进 步进电机驱动电路简介 基于步进电机细分驱动的太阳能自动跟踪系统的设 相关资源 舞蹈 机器人 步进 电机 驱动 程序设计 步进电机驱动控制 24-步进电机.zip 一体式运动控制技术 单片机步进电机的原理及控制 FBs-PLC的NC定位控制 基于ST的L6470步进驱动器原理图 评论 我来说两句…… 验证码: 技术专区 FPGA DSP MCU 示波器 步进电机 Zigbee LabVIEW Arduino RFID NFC STM32 Protel GPS MSP430 Multisim 滤波器 CAN总线 开关电源 单片机 PCB USB ARM CPLD 连接器 MEMS CMOS MIPS EMC EDA ROM 陀螺仪 VHDL 比较器 Verilog 稳压电源 RAM AVR 传感器 可控硅 IGBT 嵌入式开发 逆变器 Quartus RS-232 Cyclone 电位器 电机控制 蓝牙 PLC PWM 汽车电子 转换器 电源管理 信号放大器



评论